Ich suche Hilfe bei der Konstruktion eines mechanischen Systems.
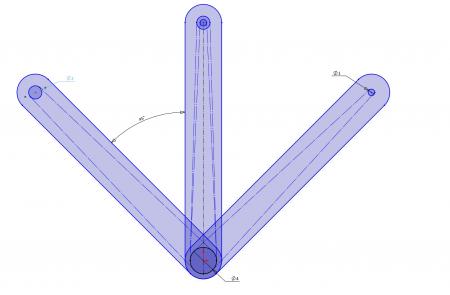
Konzeptionell habe ich an einem Ende eines Geräts einen Arm befestigt, der von seiner vertikalen Position aus um 45 Grad nach links und 45 Grad nach rechts oszilliert. Am anderen Ende dieses Arms habe ich eine Achse. Ich möchte, dass sich der Arm von seiner linken Position in seine rechte Position dreht, was etwa 90 Grad ist, und wenn er sich um 180 Grad dreht und wenn er von der rechten in die linke Position geht, die immer noch 90 Grad beträgt, dreht sich die Achse diesmal um 360 Grad.
Ich suche nach einer mechanischen Lösung, ohne einen Motor auf die Achse zu setzen.
In der Tat könnte ein kleines Diagramm es Ihnen ermöglichen, Ihr Problem besser zu verstehen.
Aber wenn ich es richtig verstanden hätte, würde ich dieses Konzept vorschlagen: Ein Arm mit einem doppelten Satz Riemen/Freilauf, indem mit den Durchmessern der Riemenscheibe gespielt wird, um den Drehwinkel der Achse am Ende des Arms zu variieren. - ein Freilauf, der den linken Riemen antreibt, wenn Sie nach links schwenken, mit einem Verhältnis von 2:1 zwischen den Schaltröllchen, um Ihre Drehung von 45° auf 90° zu verstärken - ein Freilauf, der den Riemen nach rechts antreibt, wenn Sie nach rechts schwenken, mit einem Verhältnis von 4:1 zwischen den Riemenscheiben, um Ihre Drehung von 45° auf 360° zu verstärken
Stellen Sie Riemenspanner bereit, die gut passen. Es ist 100% mechanisch, ohne Aktuator, aber seien Sie vorsichtig mit der Größe, den Drehmomenten und den Drehzahlen!
Vielen Dank an Icome für die sehr geschätzte Hilfe. In der Tat hätte ich zum besseren Verständnis ein Diagramm erstellen sollen.
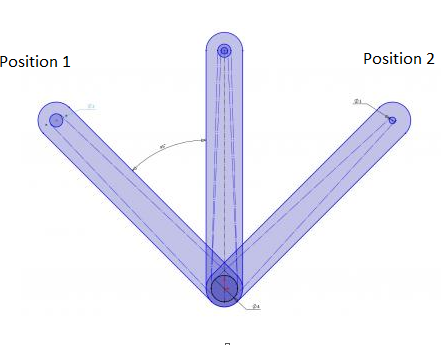
Basierend auf Ihrem Diagramm (dank Ihnen) versuche ich, die Achse am Ende des Arms um 180° zu drehen, wenn Sie von Position 1 nach Position 2 gehen, und um 360°, wenn Sie von Position 2 nach Position 1 gehen. Ich denke, dass es mit Ihrem Riemen-/Freilaufsystem funktionieren muss, aber wie gelangen Sie von einem Riemen zum anderen, je nachdem, ob der Arm von Position 1 in Position 2 und umgekehrt geht?
Da das Übersetzungsverhältnis je nach Drehrichtung des Arms unterschiedlich ist, kann nur die Lösung durch Riemenscheiben und Riemen (oder Ketten, oder Zahnräder, wenn Schlupf nicht erlaubt ist) geeignet sein, verbunden mit zwei Freiläufen der Riemenscheiben in Verbindung mit dem Rahmen. Das beigefügte Video veranschaulicht das Funktionsprinzip. Die Umlenkrollen sind übertrieben vergrößert, um Bewegungen besser unterscheiden zu können. In der Tat hängt alles von der Größe des Mechanismus ab... Wichtiger Hinweis: Da die achsgekoppelte Abtriebsriemenscheibe über den Arm angetrieben wird, betragen die Übersetzungsverhältnisse nicht 2 und 4, sondern 3 und 5.