Ik ben op zoek naar hulp bij het ontwerpen van een mechanisch systeem.
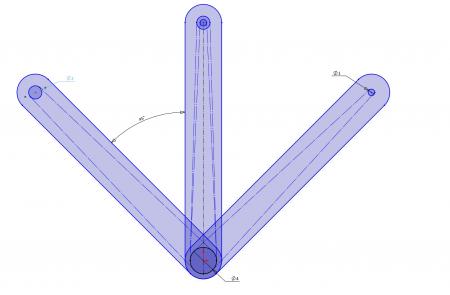
Conceptueel gezien heb ik een arm aan het ene uiteinde bevestigd aan een apparaat dat 45 graden naar links en 45 graden naar rechts oscilleert vanuit zijn verticale positie. Aan het andere uiteinde van deze arm heb ik een as. Ik zou graag willen dat de arm draait van zijn linkerpositie naar zijn rechterpositie, wat ongeveer 90 graden is, en wanneer hij 180 graden draait en wanneer hij van de rechter- naar de linkerpositie gaat, wat nog steeds 90 graden is, draait de as deze keer 360 graden.
Ik ben op zoek naar een mechanische oplossing zonder een motor op de as te zetten.
Als iemand een idee heeft, zou ik het op prijs stellen.
Inderdaad, een klein diagram kan u in staat stellen uw probleem beter te begrijpen.
Maar als ik het goed begrijp, zou ik dit concept voorstellen: een arm met een dubbele set riem/vrijloop door te spelen met katroldiameters om de draaihoek van de as aan het einde van de arm te variëren. - een vrijloop die de linkerriem aandrijft wanneer u naar links draait, met een verhouding van 2:1 tussen de poelies om uw rotatie van 45° tot 90° te versterken - een vrijloop die de riem aan de rechterkant aandrijft wanneer u naar rechts draait, met een verhouding van 4:1 tussen de poelies om uw rotatie van 45° naar 360° te versterken
Zorg voor riemspanners die goed passen. Het is 100% mechanisch, zonder actuator, maar wees voorzichtig met de grootte, koppels en snelheden!
Dank u Icome voor zeer gewaardeerde hulp. Ik had inderdaad een diagram moeten maken voor een beter begrip.
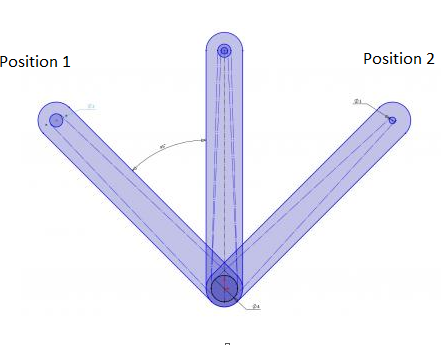
Op basis van je diagram (dankzij jou), probeer ik de as aan het einde van de arm 180° te laten doen als je van positie 1 naar positie 2 gaat en 360° als je van positie 2 naar positie 1 gaat. Ik denk dat het met je riem/vrijloopsysteem moet werken, maar hoe ga je van de ene riem naar de andere, afhankelijk van of de arm van positie 1 naar positie 2 gaat en vice versa?
Aangezien de overbrengingsverhouding verschilt afhankelijk van de draairichting van de arm, kan alleen de oplossing door middel van katrollen en riemen (of kettingen, of tandwielen als slippen niet is toegestaan) geschikt zijn, in combinatie met twee vrijloopwielen van de katrollen in verbinding met het frame. De bijgevoegde video illustreert het werkingsprincipe. De katrollen zijn overdreven uitvergroot om bewegingen beter te kunnen onderscheiden. In feite hangt het allemaal af van de grootte van het mechanisme... Belangrijke opmerking: Aangezien de aan de as gekoppelde aandrijfpoelie door de arm wordt aangedreven, zijn de overbrengingsverhoudingen niet 2 en 4, maar 3 en 5.