I have to place a point on an open path composed of splines and straight segments tangent to each other, at a defined distance from the end of this path (not a straight line distance, but following the trajectory).
Unfortunately, it doesn't seem possible to do that in the outline of the trajectory.
I decided to create a composite curve of the trajectory, and to create a reference point ("reference geometry" tool), with the composite curve and the "distance" option as a selection. But again, it doesn't work: impossible to validate, message "error: could not create the build point".
I specify that I use 2015.
If anyone has a trick to create this stitch, it would help me a lot.
The "reference point" tool does not allow you to use a curve (selecting the curve in the model tree), but an edge does (clicking on the curve in the 3D model). However, in this case, it only considers the selected edge. And in my case, the composite curve is considered by SW to be composed of several edges.
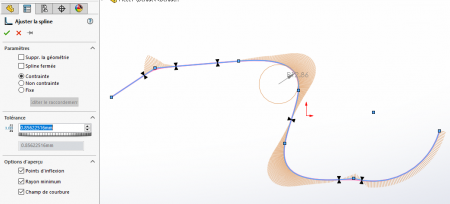
An approximate solution: Open a new sketch and create a spline that approximates the various selected entities, segments, splines, or others (Tools menu - Spline Tools - Adjust Spline). Adjust the "Tolerance" criterion to handle the accuracy of the approximation.
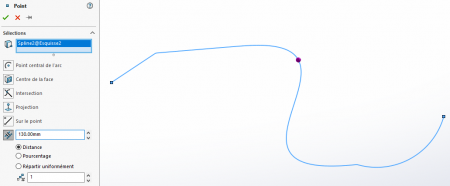
It is then possible to create a point in the form of a reference geometry ( menu Insert - Reference geometry - Point...) by selecting the spline, and indicating the curvilinear distance from the origin of the curve.
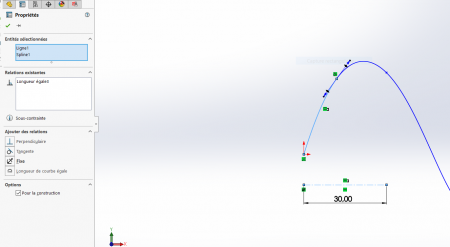
too strong! """To constrain a 2D or 3D sketched segment (curve) with a straight (constructive) line to the desired length. """
And as the trajectory sketch is subject to change, the length of the straight line is managed by a config or a macro based on an Excel file for example.
yes but no... With the solution proposed by Lynk, I can control the distance between one end of the spline and the other but
de1, no need for a segment and a constraint of equal length, I can directly put a dimension driving the length directly on a spline
of 2, said spline makes its life, and will not necessarily follow the course of my trajectory. I could add spline / trajectory coincidence points, but they will end up being distributed after some modifications of the position of the point on the trajectory, and modification of the shape of the trajectory.
I don't know if it helps but by using the curve repetition I get to that.
I created the trajectory curve and the half-sphere at its end. Then repetition by curve (2 occurrences only) of the created body . The center of the 2nd semisphere is on the trajectory and it will be driven by the repetition distance.
The body can have a different geometry if necessary.