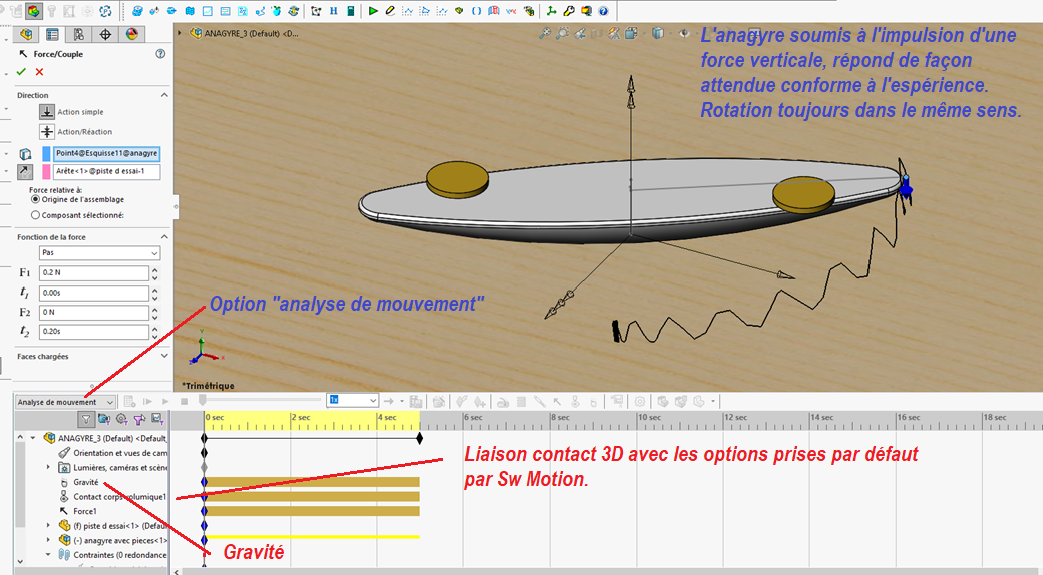
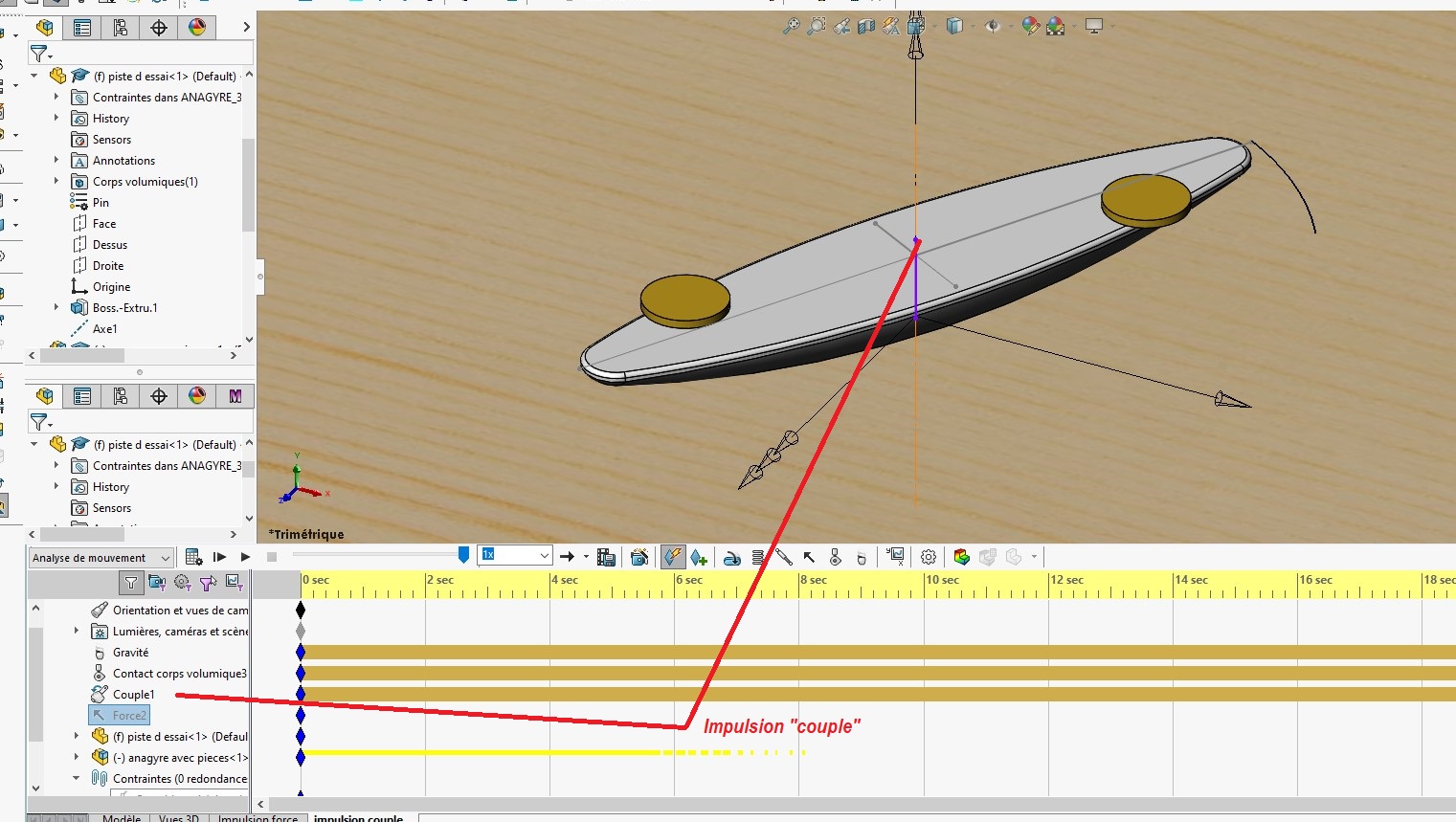
I made an anagyre in 3D printing. I try to reproduce virtually the behavior that I observe experimentally. The object, by oscillating thanks to a vertical impulse at the end of its long axis, always takes the same direction when turning. I can reproduce this effect with Motion and its default options. The object, after having been solicited by a vertical "torque impulse", - clockwise rotates until friction immobilizes it - in the trigonometric direction, rotates at a given angle, initiates a horizontal axis oscillation and then rotates in the opposite direction.
It is this second effect that I cannot reproduce. Is it provoked By the initial conditions imposed? Wrong choice of friction parameters? Wrong choice of integrator?
I was trained in a cryptic way on Motion and I couldn't find any documents to get advice for these last two arguments... Do you have anything to help me out? Thank you
Attached my SW educ workfile 2022-2023 A pdf that I had written on this theme to illustrate a course on inertial operators; here to make it easier for you to understand.
Anagyre: an object with unexpected behavior, therefore interesting. I know too little about Motion to venture into it... The attached document offers some reflections on the anagyre model and its dynamic simulation carried out with Meca3D. The laws of dynamics are the same for all simulation tools, so you may find ways to improve.
It's very basic and especially when it comes to friction it's not great. If, for example, you drop marbles into a concave container, the marbles move long after what you would see in real life. He would be unable to make a "Marble race" even aproximative ... (Countryballs Marble Race 3D | Marble Race Teams - YouTube)
I think it comes from friction that is not well configurable on the one hand and also from gravity which would not be strong enough in a way (I know it's crazy what I'm saying).
I recently trained on motion and then I quickly gave up using it. It's just good for making mechanical animations thanks to the "time line", because in this case the mechanical constraints are safe with the different types of constraints.
From my point of view, everything that is falling objects must be forgotten except to show a principle in an imprecise way.
This software has never been updated for 10 years or more and therefore has not made any "upgrade" functionality.
By the way, at Solidworks everything that is kinematic obviously doesn't interest them, but that's another story.
ZZ!
PS: by the way, for the record, the fact that I can't use Motion forces me to make a prototype which, apart from the cost of the training, will cost me + 10,000 € (it can't handle the axes that are too complex or too numerous.)
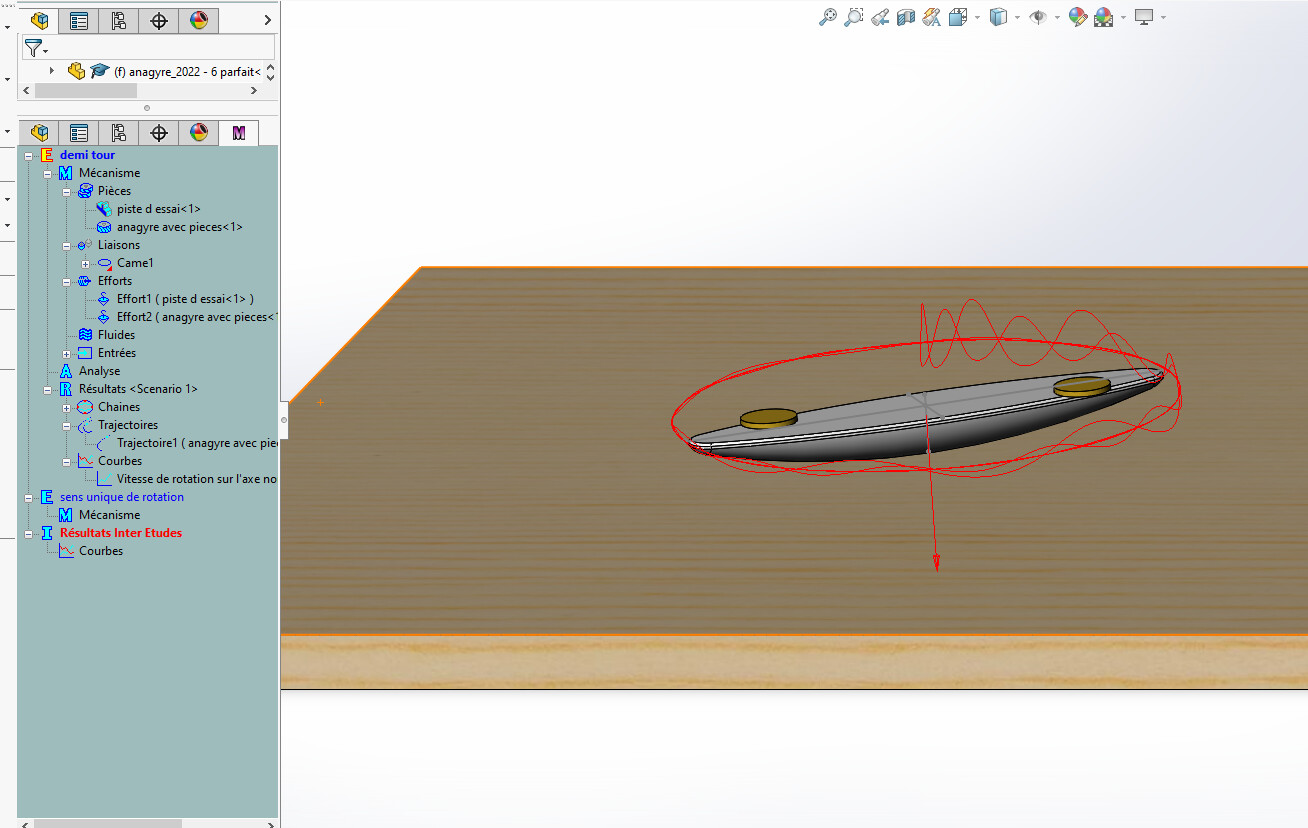
Thank you very much for your quick response; I implemented on MECA3D. Here is my first try. All I have to do is glue the measurements I can make on my real object to calibrate the values of my model and then see if a change of model can anticipate what the real one will look like!
 ... (
... (