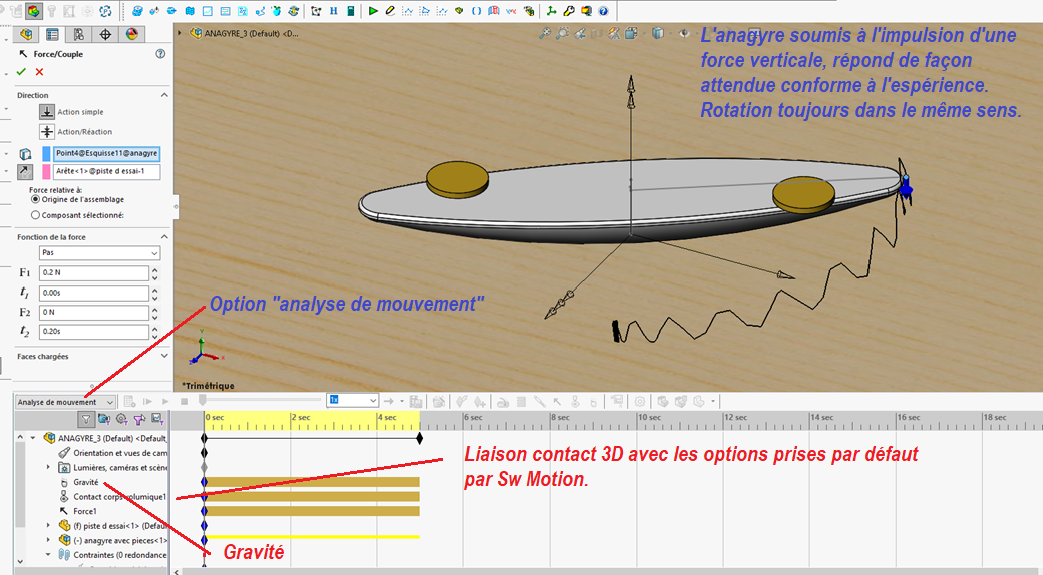
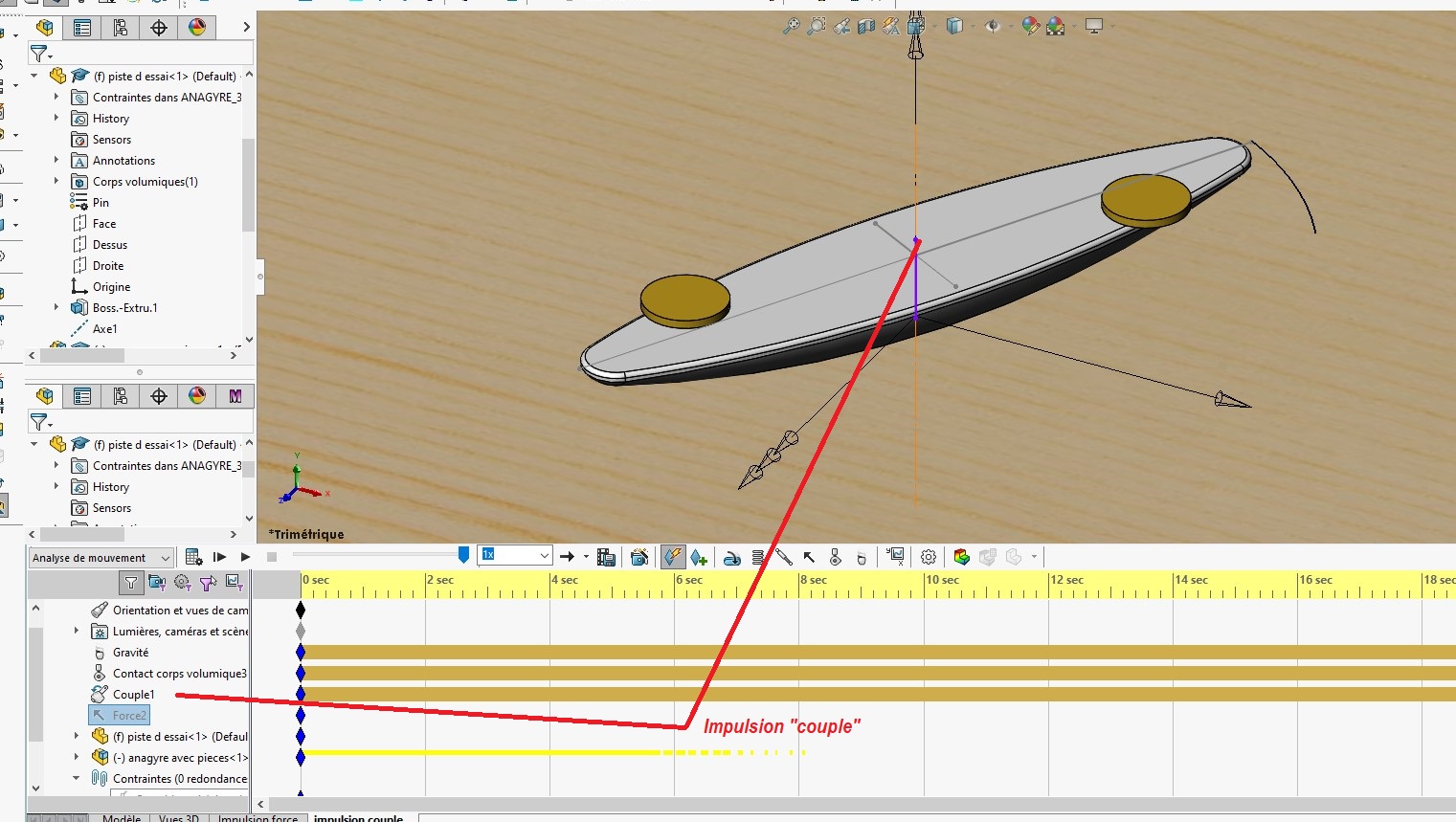
Ik heb een anagyre gemaakt in 3D-printen. Ik probeer het gedrag dat ik experimenteel waarneem vrijwel te reproduceren. Door te oscilleren dankzij een verticale impuls aan het einde van zijn lange as, neemt het object altijd dezelfde richting aan bij het draaien. Ik kan dit effect reproduceren met Motion en de standaardopties. Het voorwerp, na te zijn aangesproken door een verticale "koppelimpuls", - draait met de klok mee totdat wrijving het immobiliseert - in goniometrische richting, roteert onder een bepaalde hoek, initieert een oscillatie van de horizontale as en draait vervolgens in de tegenovergestelde richting.
Het is dit tweede effect dat ik niet kan reproduceren. Wordt het geprovoceerd? Door de eerste voorwaarden die zijn opgelegd? Verkeerde keuze van wrijvingsparameters? Verkeerde keuze van integrator?
Ik was op een cryptische manier getraind in Motion en ik kon geen documenten vinden om advies te krijgen voor deze laatste twee argumenten... Heb je iets om me te helpen? Bedankt
Gehecht mijn SW educ werkbestand 2022-2023 Een pdf die ik over dit thema had geschreven ter illustratie van een cursus over traagheidsoperatoren; hier om het voor u gemakkelijker te maken om het te begrijpen.
Anagyre: een object met onverwacht gedrag, dus interessant. Ik weet te weinig van Motion om me eraan te wagen... Het bijgevoegde document biedt enkele reflecties op het anagyre-model en de dynamische simulatie ervan die met Meca3D is uitgevoerd. De wetten van de dynamica zijn hetzelfde voor alle simulatietools, dus misschien vind je manieren om te verbeteren.
Het is erg basic en vooral als het om wrijving gaat, is het niet geweldig. Als je bijvoorbeeld knikkers in een holle bak laat vallen, bewegen de knikkers lang na wat je in het echt zou zien. Hij zou niet in staat zijn om een "Marble race" zelfs maar proximatief te maken ... (Countryballs Knikker Race 3D | Knikker Race Teams - YouTube)
Ik denk dat het enerzijds komt door wrijving die niet goed configureerbaar is en anderzijds ook door zwaartekracht die op een bepaalde manier niet sterk genoeg zou zijn (ik weet dat het gek is wat ik zeg).
Ik heb onlangs getraind op beweging en toen gaf ik het snel op. Het is gewoon goed voor het maken van mechanische animaties dankzij de "tijdlijn", omdat in dit geval de mechanische beperkingen veilig zijn met de verschillende soorten beperkingen.
Naar mijn mening moet alles wat vallende voorwerpen zijn, worden vergeten, behalve om een principe op een onnauwkeurige manier weer te geven.
Deze software is al 10 jaar of langer nooit geüpdatet en heeft daarom geen "upgrade"-functionaliteit gemaakt.
Trouwens, bij Solidworks interesseert alles wat kinematisch is hen natuurlijk niet, maar dat is een ander verhaal.
ZZ!
PS: trouwens, voor de goede orde, het feit dat ik Motion niet kan gebruiken, dwingt me om een prototype te maken dat, afgezien van de kosten van de training, me + 10.000 € zal kosten (het kan de assen niet aan die te complex of te talrijk zijn.)
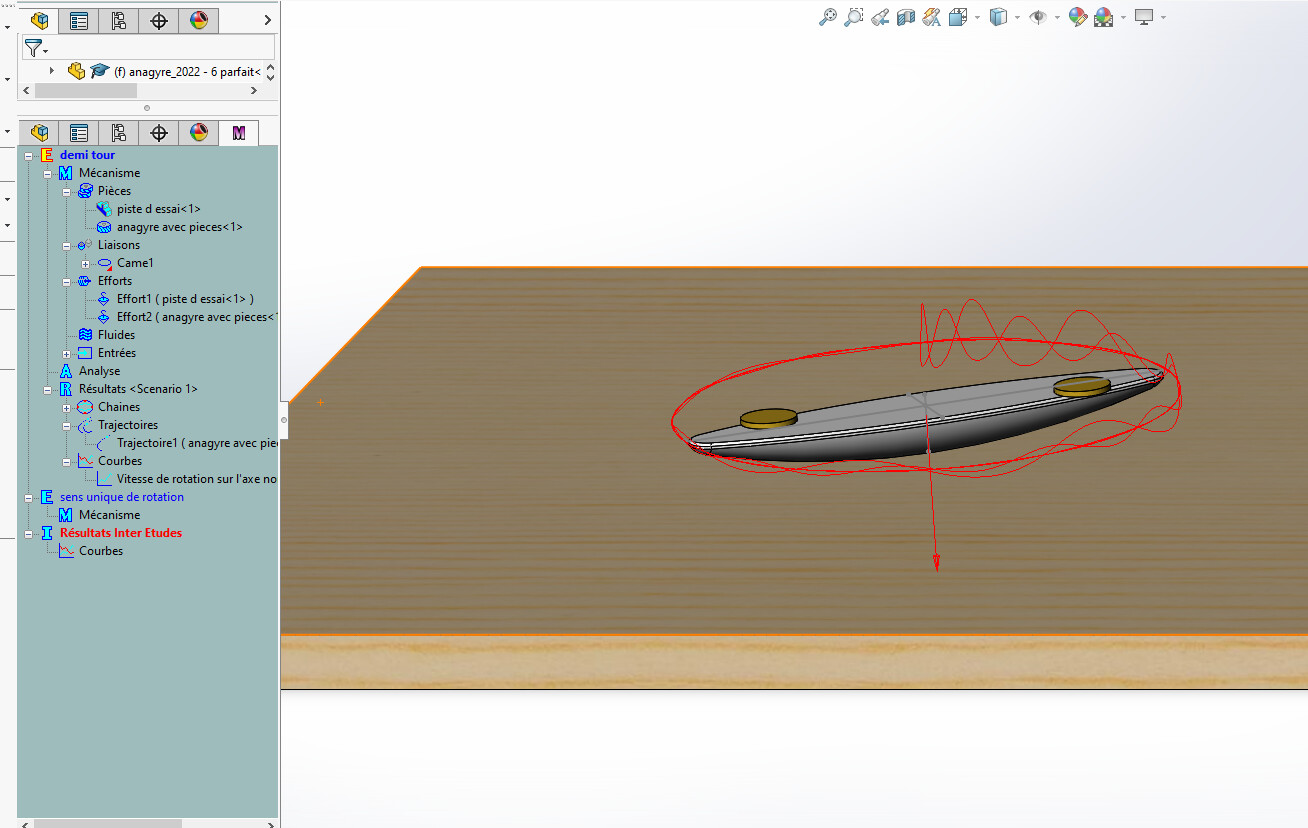
Hartelijk dank voor uw snelle reactie; Ik heb geïmplementeerd op MECA3D. Hier is mijn eerste poging. Het enige wat ik hoef te doen is de metingen die ik kan doen op mijn echte object te plakken om de waarden van mijn model te kalibreren en dan te kijken of een verandering van model kan anticiperen op hoe het echte eruit zal zien!
 te maken ... (
te maken ... (