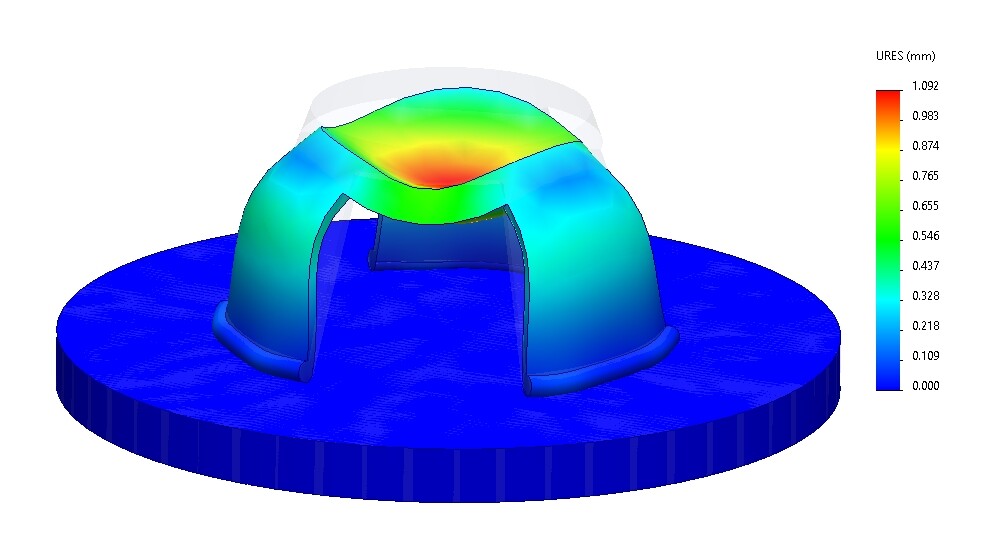
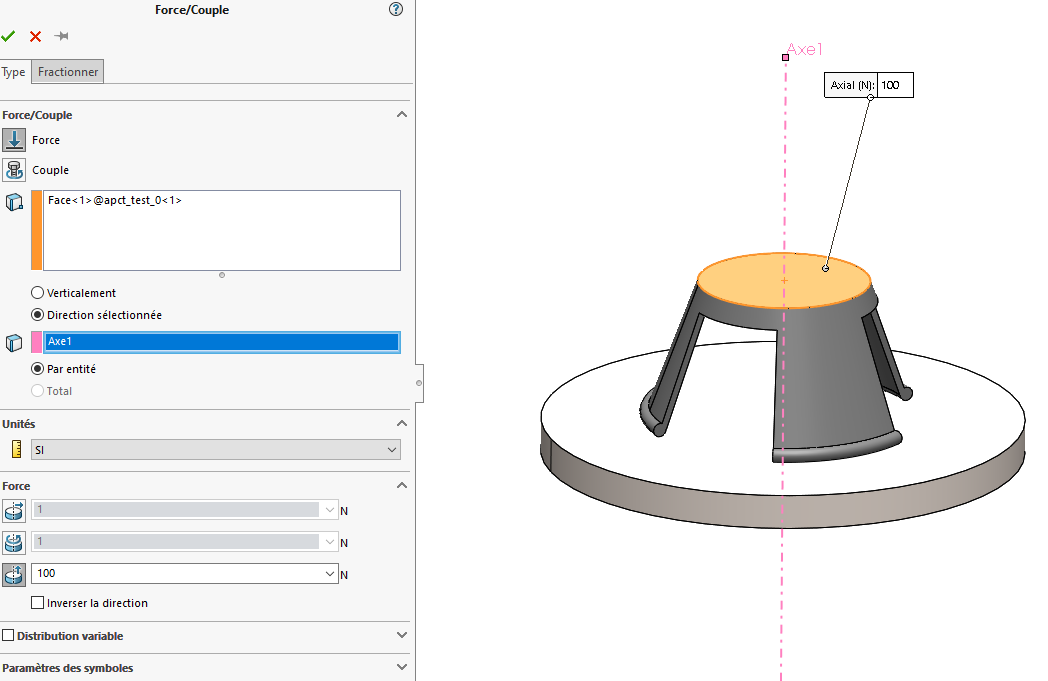
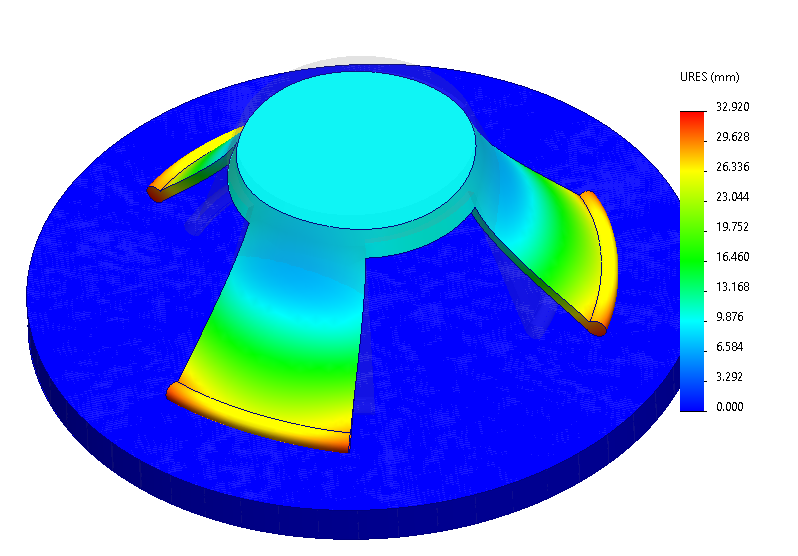
Hallo In Solidworks Premium möchte ich die Verformungen eines Teils unter Belastung simulieren (Reißverschluss). test_0.zip (232.3 KB) Wenn Sie auf die Oberseite des " Stativs " drücken, sollten sich die Füße normalerweise nach außen spreizen. Ich bekomme nur einen Quetsch. Die Füße bleiben fixiert.
Hallo; Ihr System ist von Natur aus instabil, es wird nicht einfach sein, konsistente Ergebnisse daraus zu erzielen. An Ihrer Stelle füge ich eine Verschiebungsbeschränkung entlang einer koaxialen Achse zwischen Ihrer Auflagefläche (dem Boden) und der Mitte der Oberfläche Ihres Stativs hinzu.
Sie hätten mehr mögliche Antworten, wenn Sie Ihr Modell in einer älteren Version als SW2025 anbieten. Ab der Version 2024 bietet Solidworks die Option " Speichern unter " in einer älteren Version an...
Vielen Dank für Ihre Antworten. @Maclane : Wo ist diese Einschränkung der Verdrängung? Ich habe eine ganze Reihe von " erzwungenen Verschiebungen " ausprobiert, aber ich sehe nicht, wie ich die Verschiebung axial begrenzen kann. @m_blt : Akten im Jahr 2024: test_2.zip (6,1 MB)
Da das Teil symmetrisch ist, sollte die Berechnung von 1/3 des Modells viele Stabilitätsprobleme / unkontrollierte Verschiebungen lösen. Andernfalls sollte SW keine Probleme haben, den Ringkern-/Ebenenkontakt normal zu verwalten.
NB; Es ist nicht nötig, den Raum unten zu modellieren, wenn Sie eine unendlich starre Ebene in Betracht ziehen können. Es wird das Modell/die Berechnung erleichtern
@froussel : Ja, ich könnte einen Teil des Modells vollständig simulieren, aber da die Gesamtantwort seltsam ist, habe ich kein Vertrauen in das Ergebnis eines Segments... Ich werde es trotzdem versuchen!
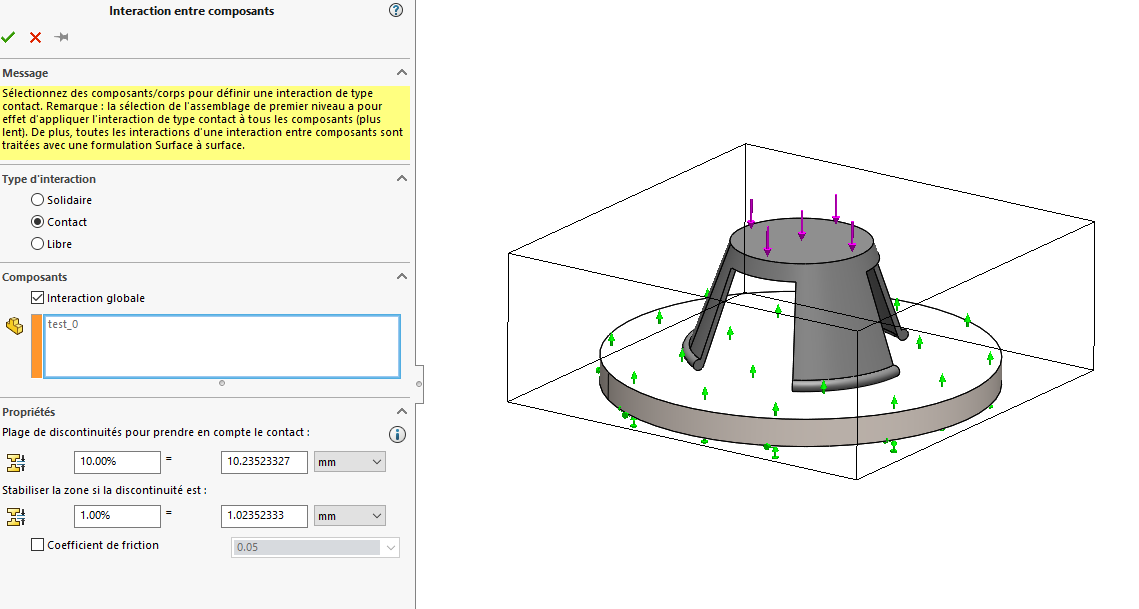
Wie in einer früheren Antwort angegeben, ergibt sich das Problem aus der Tatsache, dass die " Kontakte " des Stativs mit der Basis sein Gleichgewicht nicht gewährleisten. Es kann auf der Karte gleiten, daher die Visualisierung von Bewegungen. Dies gilt auch dann, wenn die auf die Oberseite ausgeübte Kraft vertikal ist und keine Komponente induziert, die diese Verschiebung verursacht. Der Fehler liegt in der Diskretisierung des Modells.
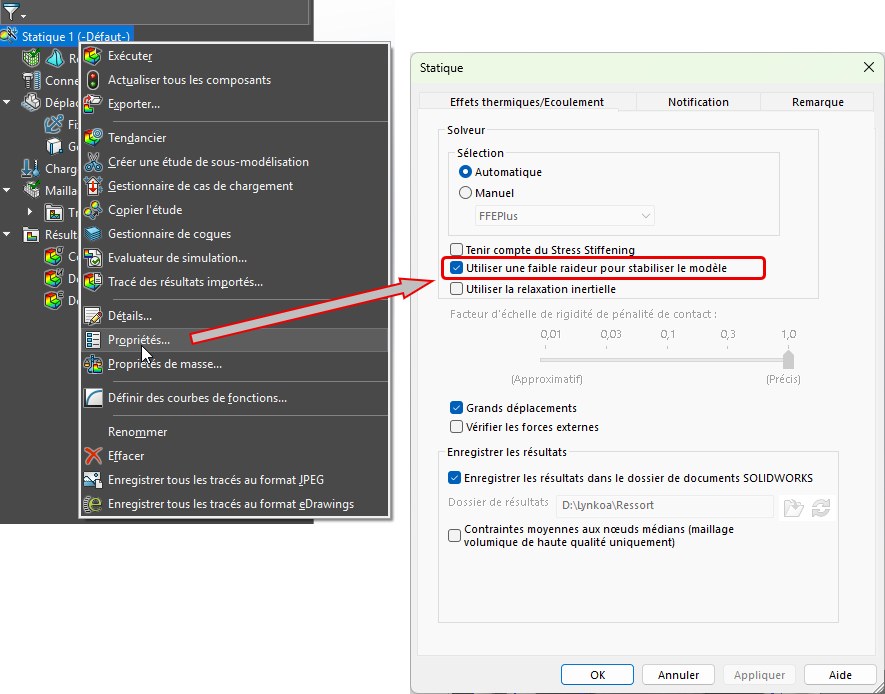
Die Antwort besteht darin, Verschiebungsbeschränkungen aufzuerlegen, um das Stativ zu immobilisieren. Nicht immer einfach... Eine einfachere Lösung besteht darin, eine leichte " Steifigkeit " von außen einzuführen, um die Balance zu gewährleisten.
Diese Steifigkeit reicht aus, um das Gleichgewicht ohne nennenswerten Kraftaufwand zu gewährleisten... Beachten Sie, dass das Einbringen von Reibung in die Definition des Kontakts das Problem ebenfalls lösen kann.
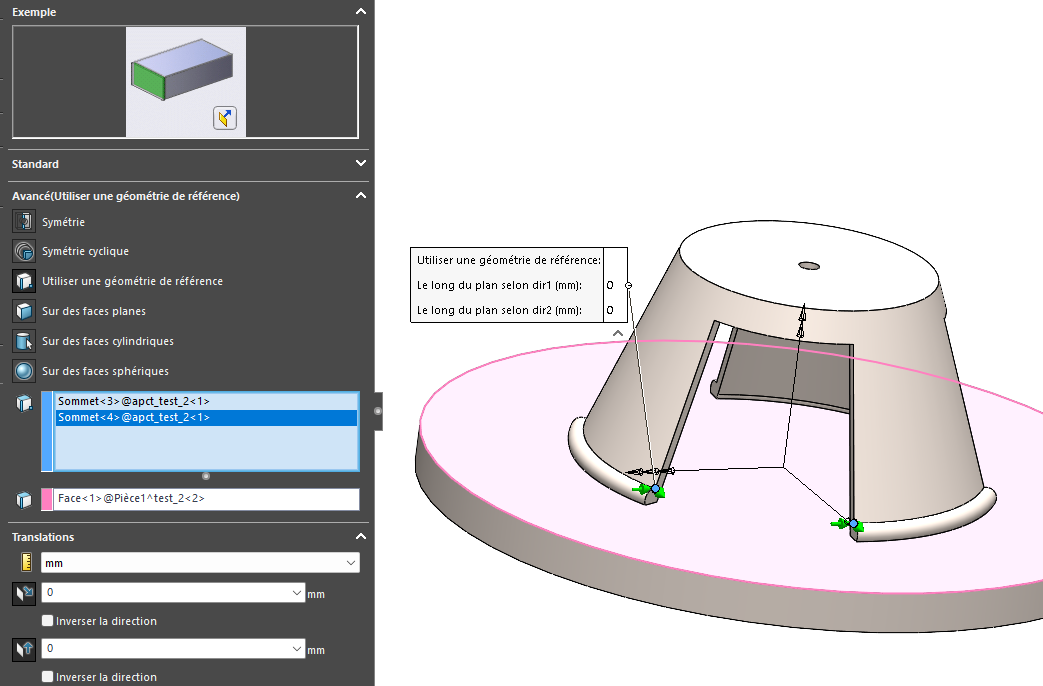
Vielen Dank an euch alle und besonders @Walter_POOT ! Durch das Aufzwingen einer Referenzgeometrie wird die Verschiebung kohärent (muss durch Berechnungen überprüft werden).
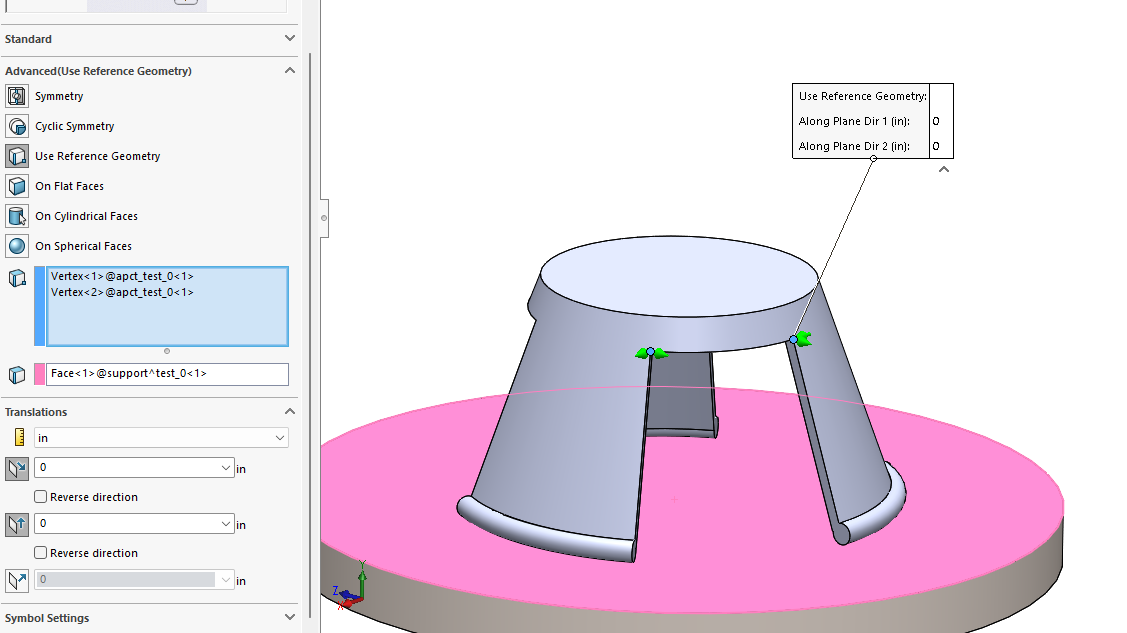
Hüten Sie sich vor dieser Bewegungseinschränkung, die in 2 Punkten auferlegt wird und meine Bemerkung in der vorigen Botschaft rechtfertigt:
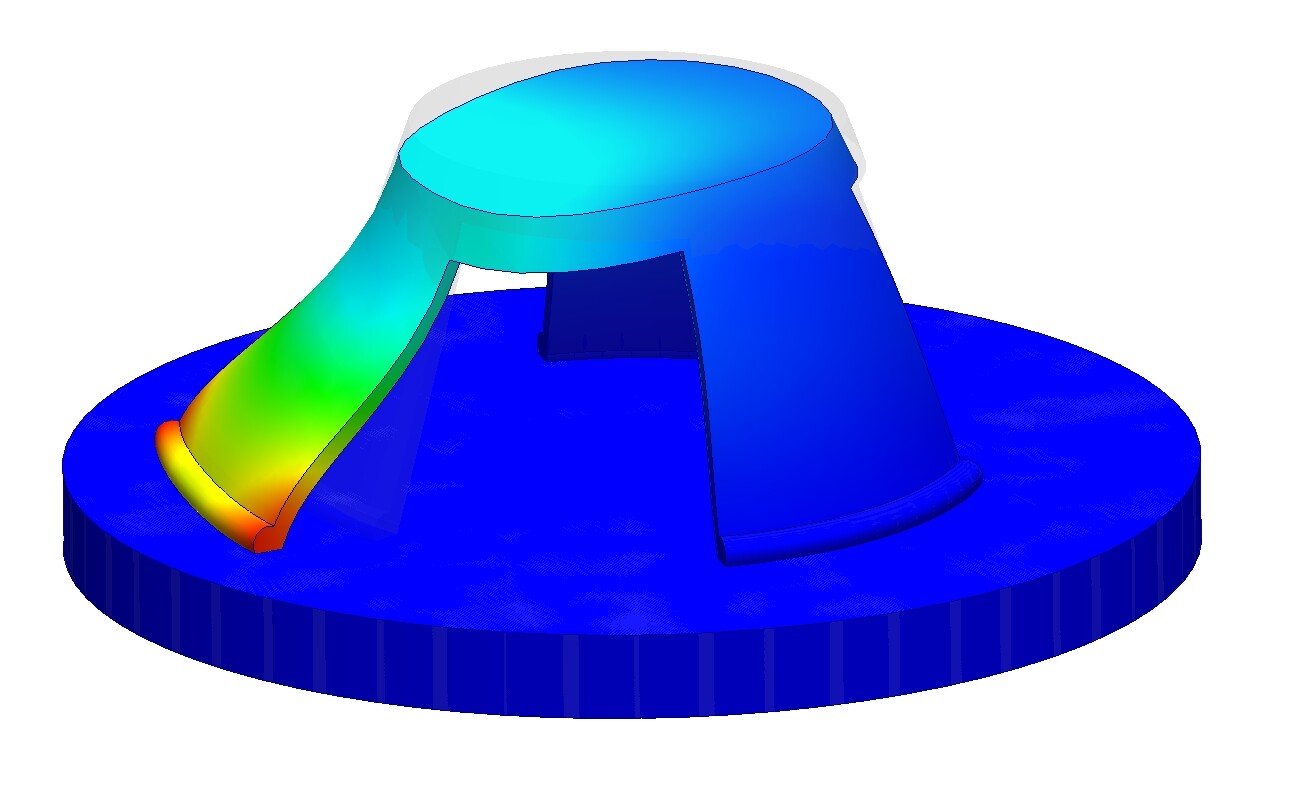
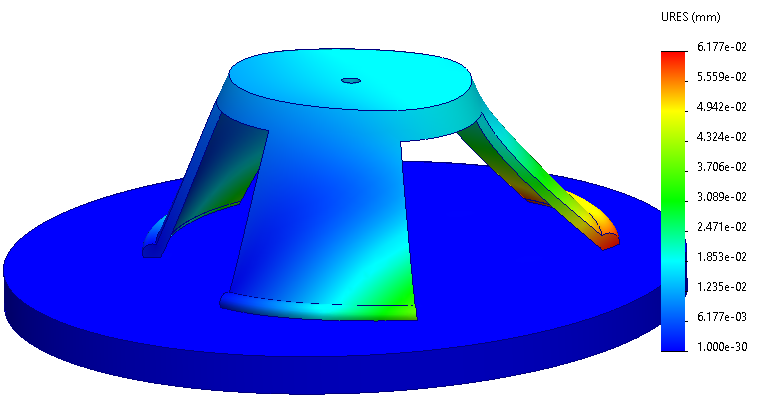
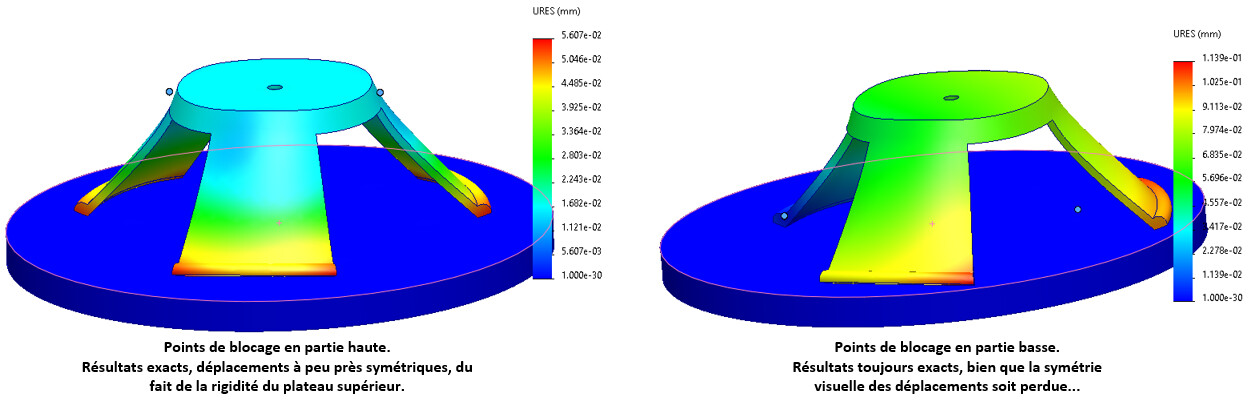
Nullverschiebung parallel zur Ebene der Basis an zwei Punkten beschränken Erfordert, dass der Abstand zwischen ihnen beim Laden konstant bleibt. In diesem Fall ist der obere Teil des Stativs sehr steif, wodurch das Ergebnis der exakten Lösung nahe kommt. Wendet man aber die gleiche Regel auf zwei andere Punkte an, wie in der Abbildung unten, so bleibt der Abstand zwischen den beiden Füßen konstant.
Und hier ist das Prinzip, obwohl das Prinzip das gleiche ist, sehr unterschiedlich: geringe Verformung der beiden linken Füße und viel deutlichere Verformung des rechten Fußes.
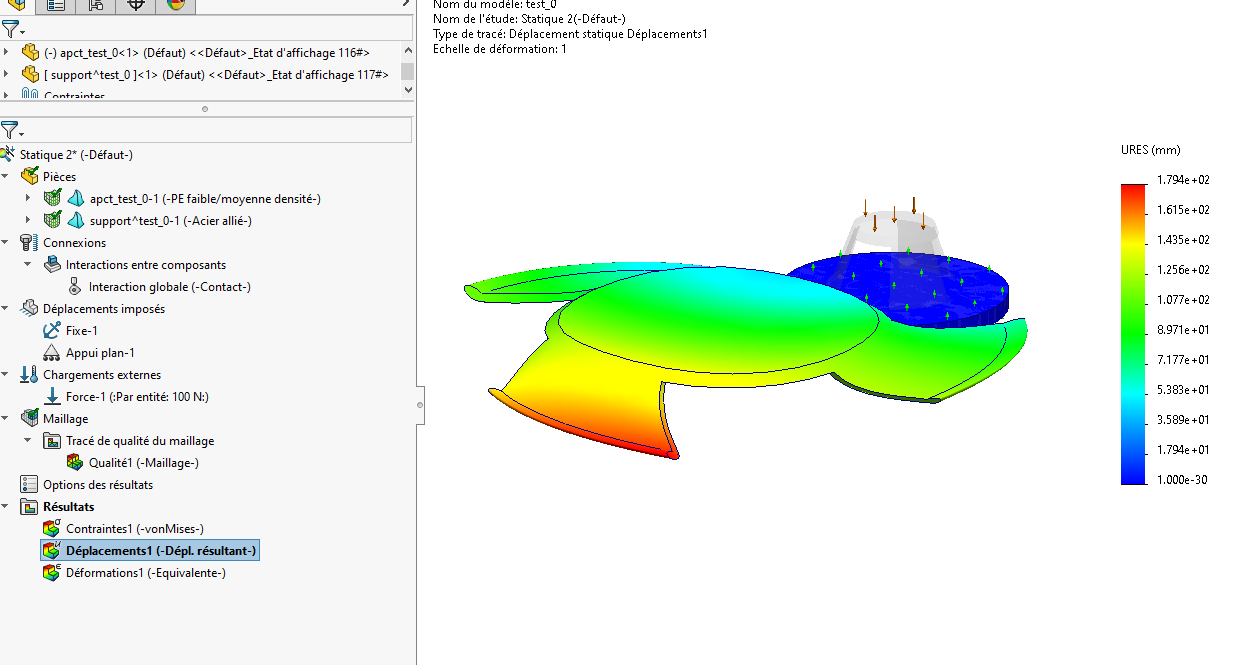
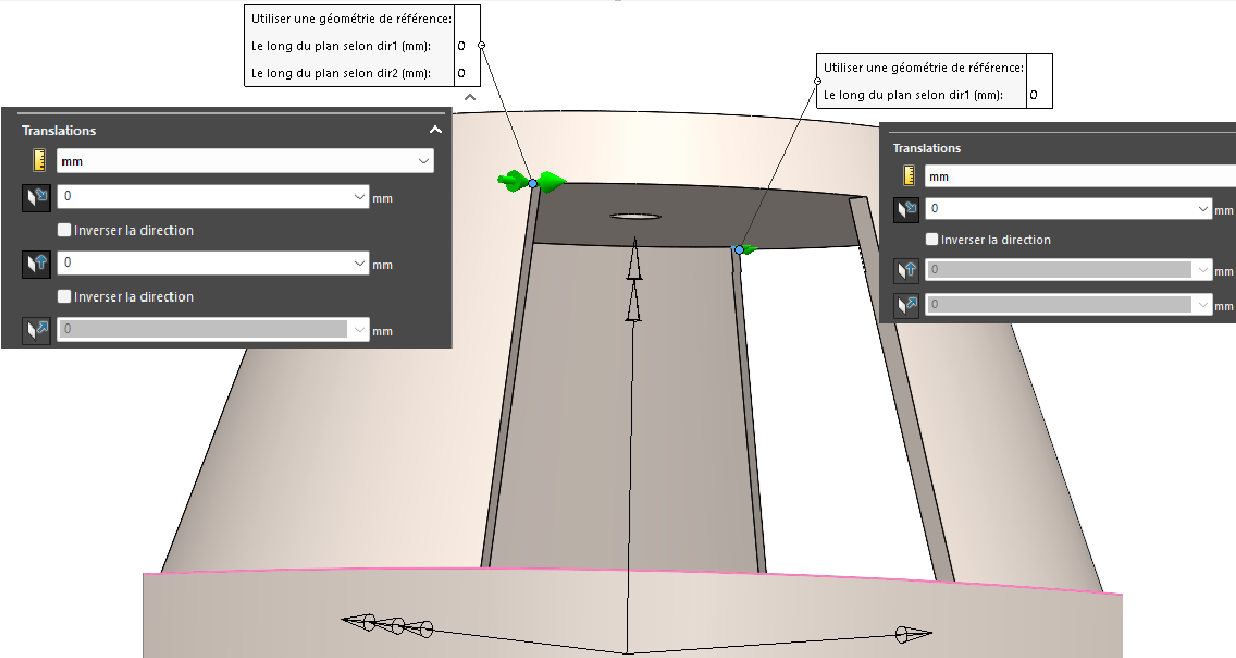
Tatsächlich lässt der globale Kontakt, wie er in den Wechselwirkungen definiert ist, dem Stativ die Möglichkeit einer ebenen Bewegung (RotY, TrslX, TrslZ), d.h. 3 Freiheitsgrade. Es erfordert daher 3 Reisebedingungen, um es ruhig zu stellen, während das vorgeschlagene Modell vier (TrslX, TrslZ) an zwei Punkten auferlegt. Mein Vorschlag: Verwenden Sie zwei diametral entgegengesetzte Punkte, um die Symmetrie des Modells zu erhalten, mit (TrslX, TrslZ) für den ersten und nur (TrslX) für den zweiten.
Ich habe mir Ihr Simulations-Setup angesehen und denke, ich verstehe das Problem, mit dem Sie konfrontiert sind. Wenn Sie auf die Oberseite des Stativs drücken, erwarten Sie, dass sich die Beine nach außen spreizen – ähnlich wie sich die Basis eines Fahnenmastes verhalten würde, wenn sie nicht richtig verankert wäre. (Erinnert mich lustigerweise daran, wie sich einige amerikanische Flaggen an flexiblen Stangen unter Windbelastung biegen – ähnliches Konzept, anderer Maßstab!)
Aus Ihrer Beschreibung klingt es so, als ob die Randbedingungen die Füße überfordern. Wenn die Füße " gequetscht " werden, sich aber nicht nach außen bewegen, überprüfen Sie, ob:
Sie haben versehentlich zu viele Freiheitsgrade an der Basis fixiert – selbst kleine Einschränkungen können die erwartete Bewegung nach außen verhindern.
Wenn Sie eine Baugruppe verwenden, befinden sich Kontaktdefinitionen zwischen den Teilen – stellen Sie sicher, dass Platz für realistische Bewegungen vorhanden ist.
Die nicht zylindrische Fußgeometrie macht es schwierig, Standardstützen mit fester Fläche oder "Rolle/Schieber " zu verwenden. In diesem Fall sollten Sie die Verwendung von Remote-Verschiebung oder Referenzgeometrie in Betracht ziehen, um realistisches Fußverhalten zu simulieren, ohne es zu stark einzuschränken.
Wenn Sie SolidWorks Premium verwenden, versuchen Sie es mit der nichtlinearen statischen Analyse , wenn eine große Verformung zu erwarten ist.
Fühlen Sie sich frei, weitere Screenshots oder Ihre Einrichtungsdetails zu teilen – ich helfe Ihnen gerne weiter.