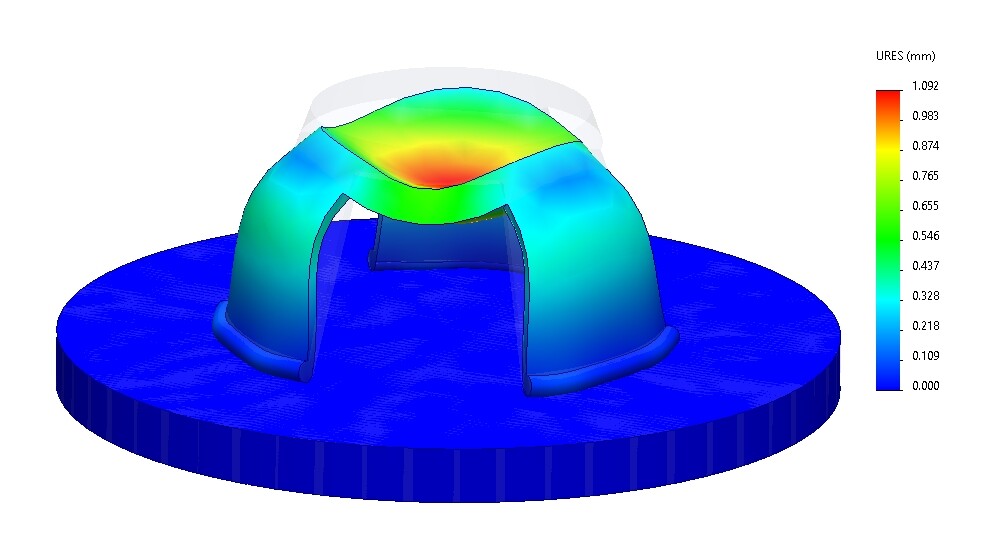
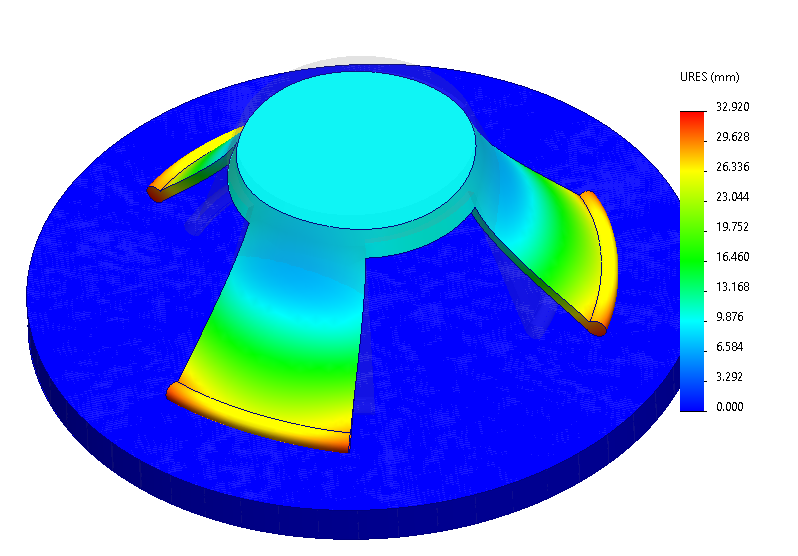
Witam W Solidworks Premium chcę zasymulować odkształcenia części pod wpływem naprężenia (połączenie suwakowe). test_0.zip (232.3 KB) Zwykle, jeśli naciśniesz górną część " statywu ", stopy powinny rozłożyć się na zewnątrz. Po prostu dostaję zgniatania. Stopy pozostają nieruchome.
Witam; Twój system jest z natury niestabilny, nie będzie łatwo uzyskać z niego spójne wyniki. W twoim miejscu dodam ograniczenie przemieszczenia wzdłuż osi współosiowej między twoją powierzchnią podparcia (podłożem) a środkiem powierzchni twojego statywu.
Miałbyś więcej możliwych odpowiedzi, oferując swój model w starszej wersji niż SW2025. Od wydania 2024 Solidworks oferuje opcję " Zapisz jako " w starszej wersji...
Dziękuję za odpowiedzi. @Maclane : Gdzie jest to ograniczenie przemieszczenia? Próbowałem całej masy " wymuszonych przemieszczeń ", ale nie widzę, jak ograniczyć przemieszczenie osiowo. @m_blt : Pliki w 2024 roku: test_2.zip (6.1 MB)
Ponieważ część jest symetryczna, obliczenie a1/3 modelu powinno rozwiązać wiele problemów ze statecznością / niekontrolowanymi przemieszczeniami. W przeciwnym razie SW nie powinien mieć problemu z normalnym zarządzaniem stykiem toroidalnym / płaskim.
NB; Nie ma potrzeby modelowania pomieszczenia poniżej, jeśli możesz wziąć pod uwagę nieskończenie sztywną płaszczyznę. Rozjaśni to model/obliczenia
@froussel : Tak, mógłbym całkowicie zasymulować część modelu, ale ponieważ ogólna odpowiedź jest dziwna, nie mam zaufania do wyniku segmentu... I tak spróbuję!
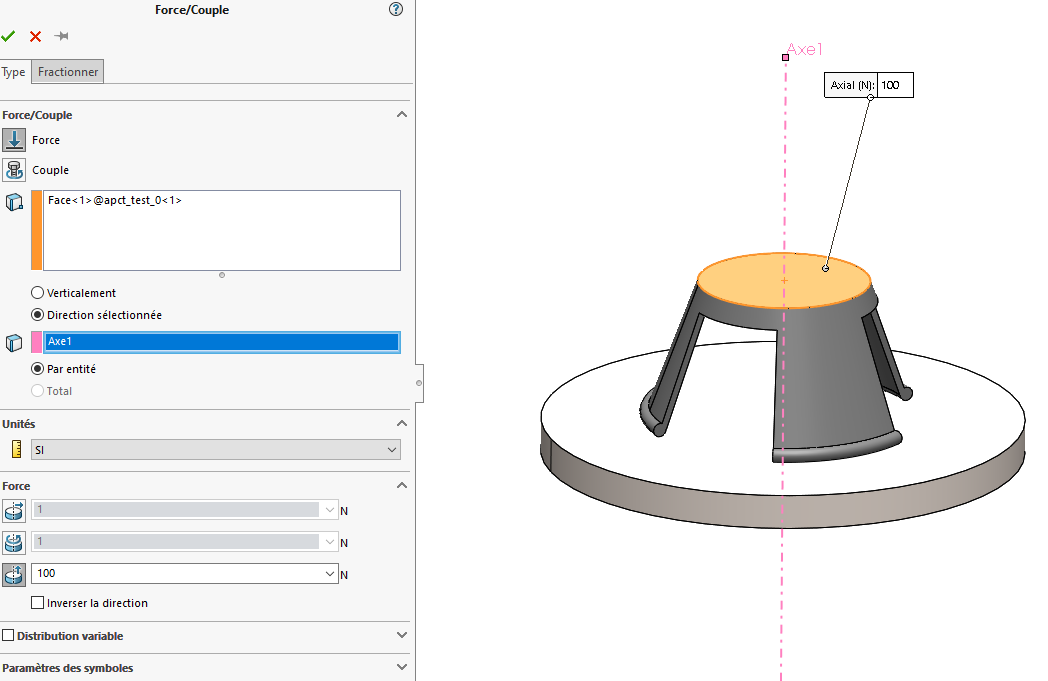
Jak wskazano w poprzedniej odpowiedzi, problem wynika z faktu, że " styki " statywu z podstawą nie zapewniają jego równowagi. Może ślizgać się po mapie, stąd wizualizacja ruchów. Dzieje się tak nawet wtedy, gdy siła przyłożona do górnej powierzchni jest pionowa i nie indukuje elementu powodującego to przemieszczenie. Wina leży w dyskretyzacji modelu.
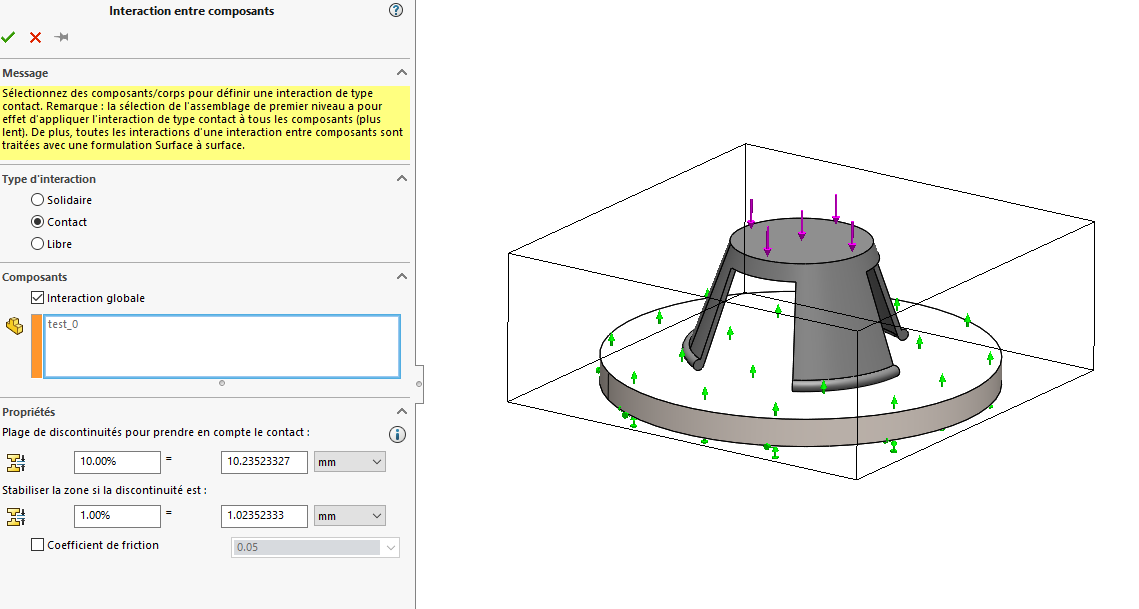
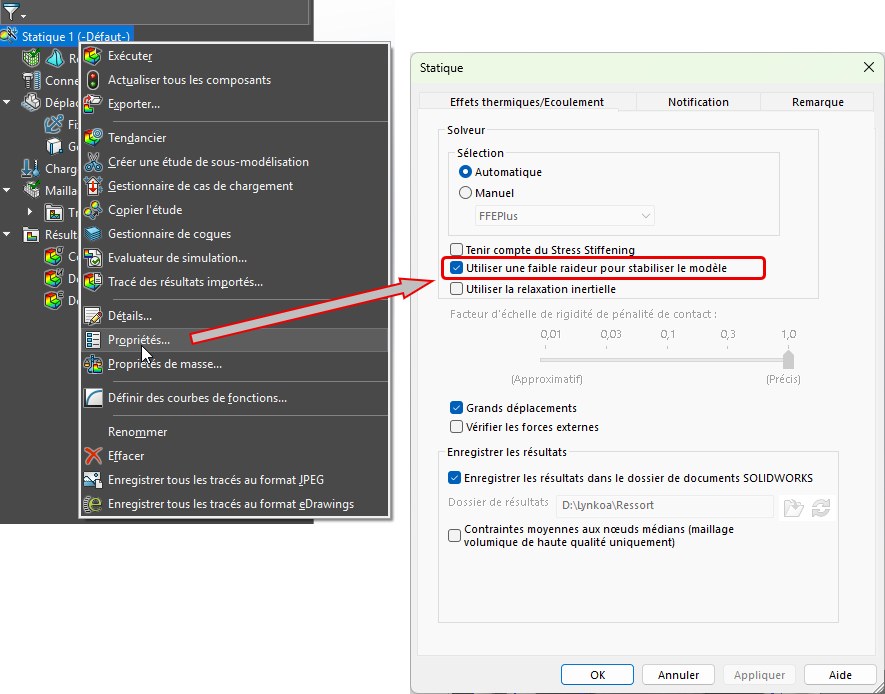
Odpowiedzią jest nałożenie ograniczeń przemieszczenia w celu unieruchomienia statywu. Nie zawsze jest to łatwe... Prostszym rozwiązaniem jest wprowadzenie lekkiej " sztywności " od zewnątrz, aby zapewnić równowagę.
Ta sztywność jest wystarczająca, aby zapewnić równowagę bez wprowadzania znacznego wysiłku... Należy pamiętać, że wprowadzenie tarcia do definicji kontaktu może również rozwiązać problem.
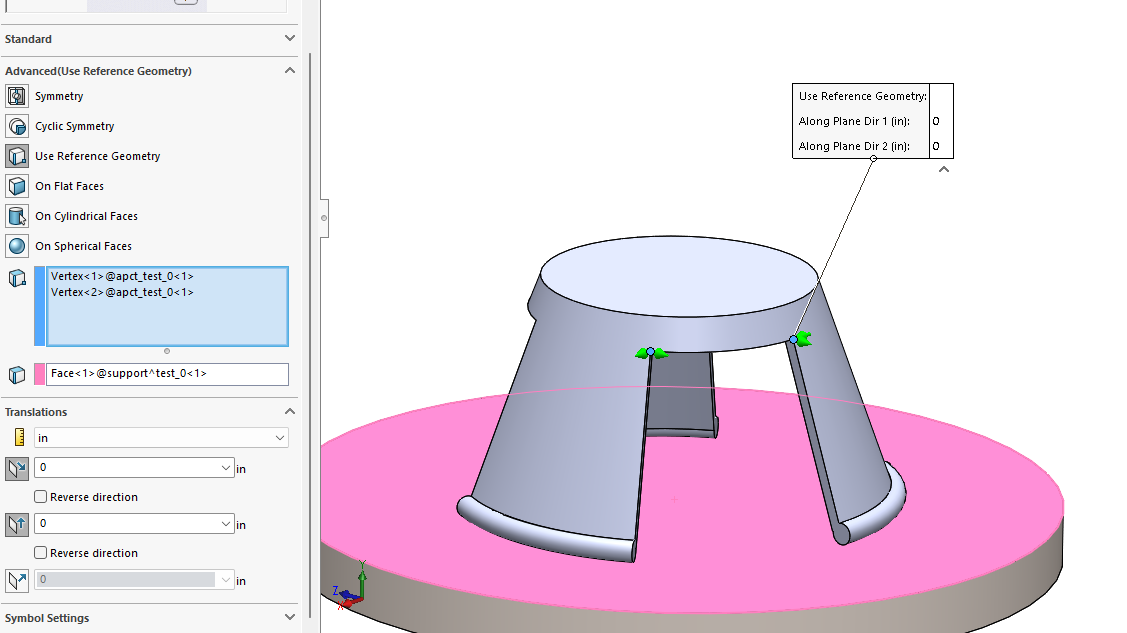
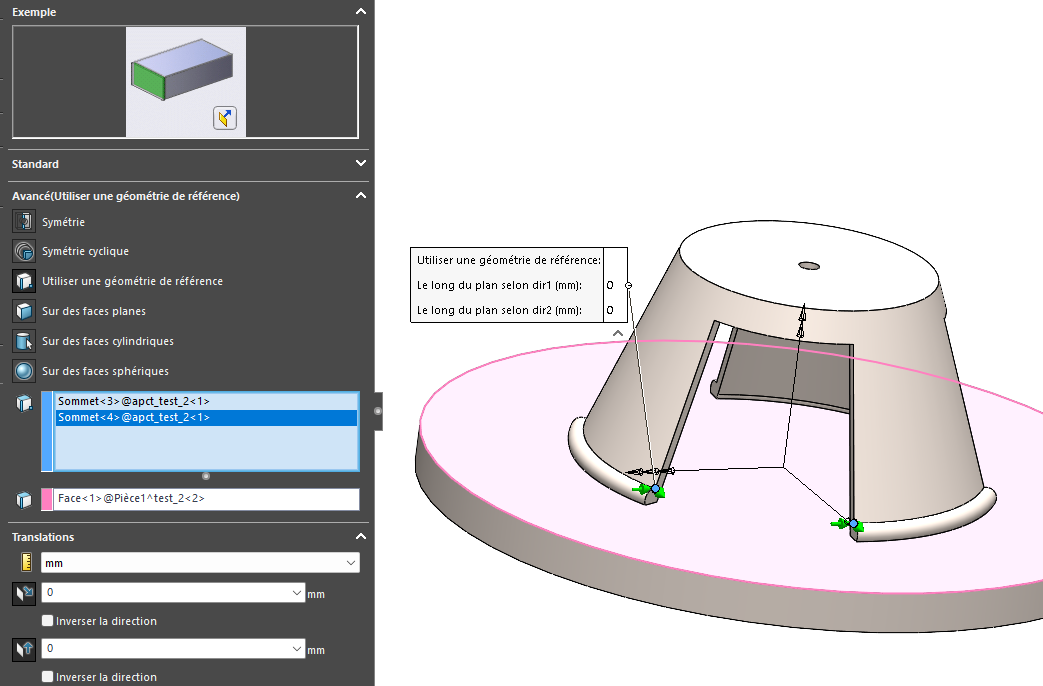
Dziękujemy wszystkim, a szczególnie @Walter_POOT ! Rzeczywiście, poprzez narzucenie geometrii odniesienia, przemieszczenie staje się spójne (do zweryfikowania za pomocą obliczeń).
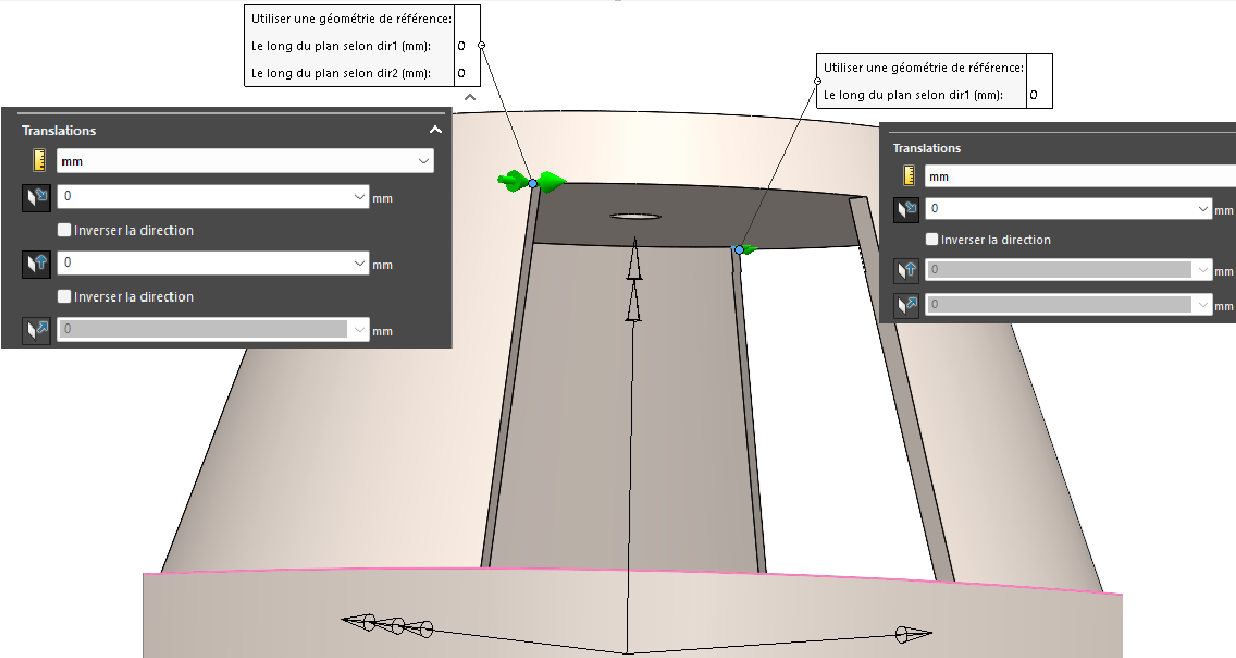
Uważaj na owo ograniczenie ruchu nałożone w 2 punktach, co uzasadnia moją uwagę w poprzedniej wiadomości:
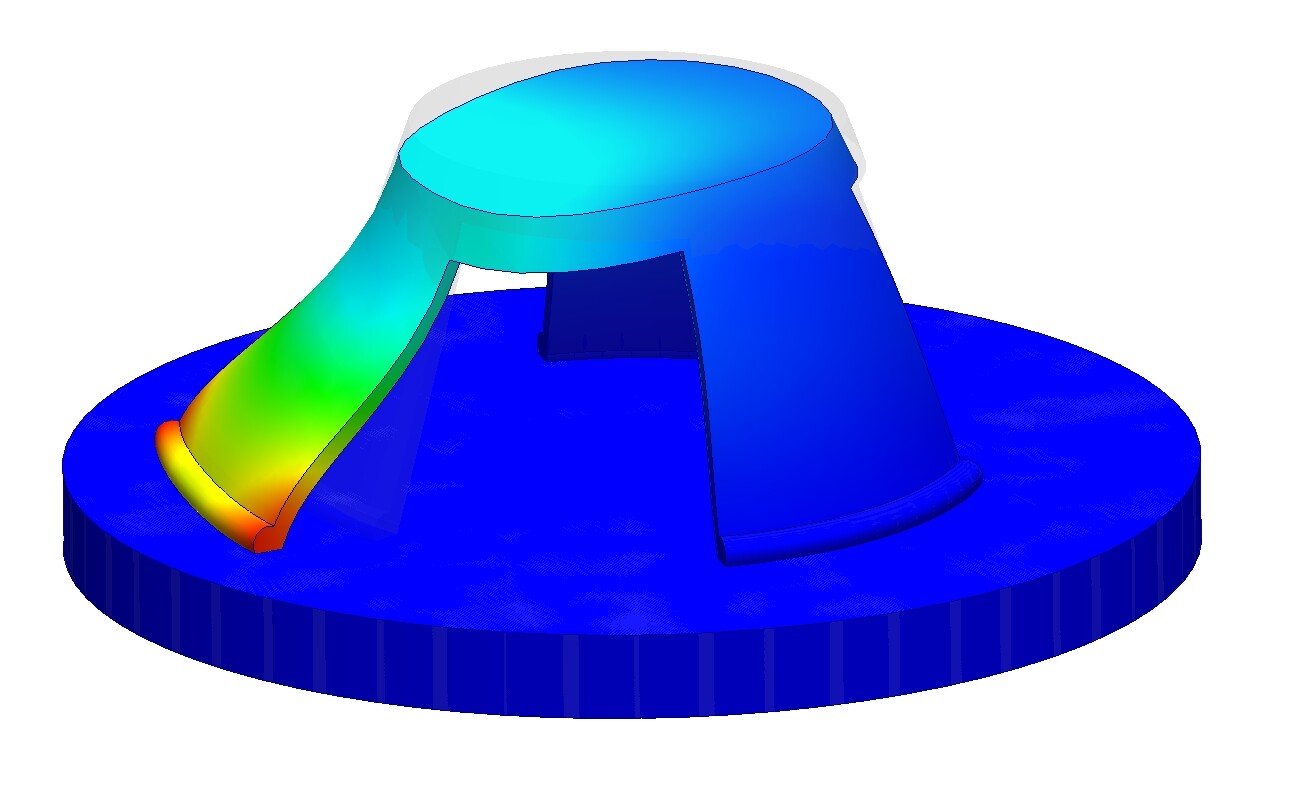
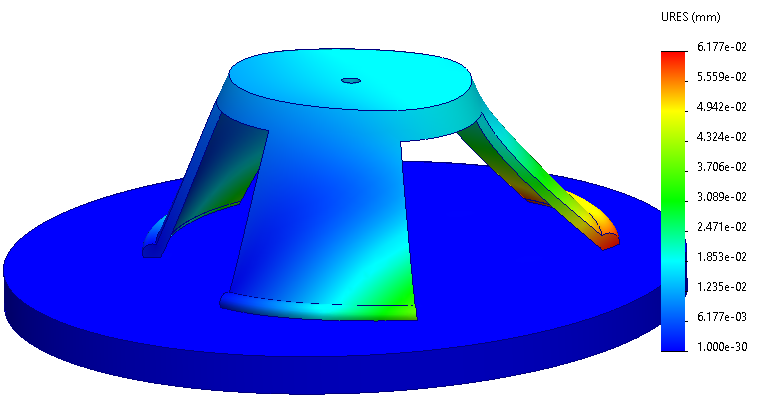
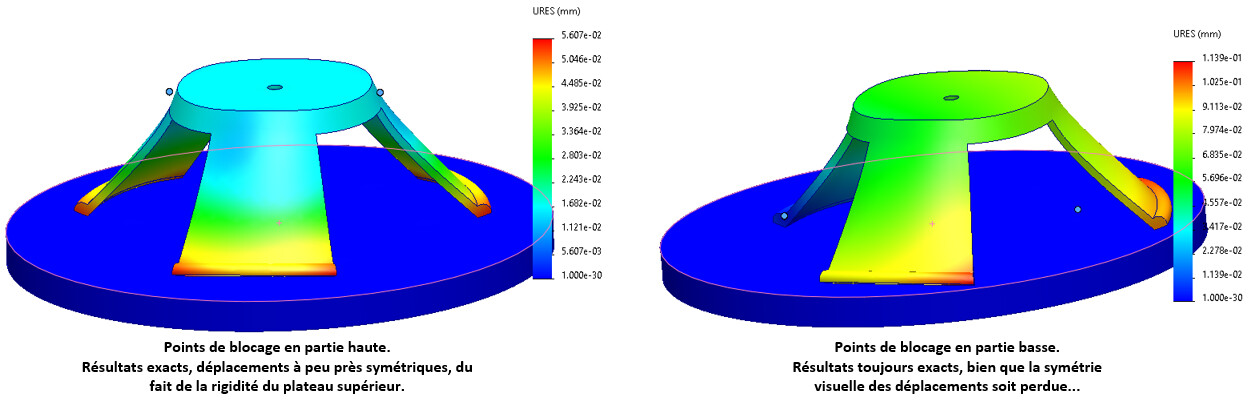
Ogranicz zerowe przemieszczenie równolegle do płaszczyzny podstawy w dwóch punktach Wymaga, aby odległość między nimi pozostała stała podczas obciążenia. W tym przypadku górna część statywu jest bardzo sztywna, co sprawia, że wynik jest zbliżony do dokładnego rozwiązania. Ale jeśli ta sama reguła zostanie zastosowana do dwóch innych punktów, jak na poniższej ilustracji, odległość między dwiema stopami jest utrzymywana na stałym poziomie.
I tutaj, chociaż zasada jest taka sama, wynik jest bardzo różny: niewielka deformacja dwóch lewych stóp i znacznie bardziej znacząca deformacja prawej stopy.
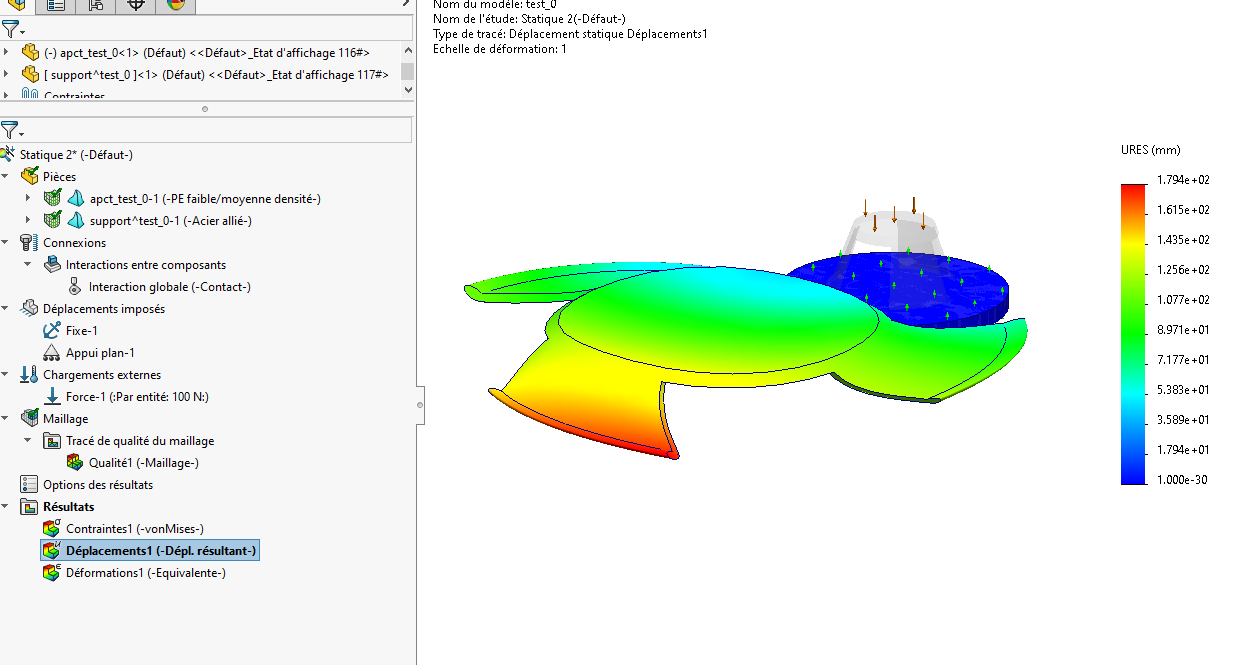
W rzeczywistości kontakt globalny zdefiniowany w oddziaływaniach pozostawia statywowi możliwość ruchu płaskiego (RotY, TrslX, TrslZ), tj. 3 stopnie swobody. Wymaga zatem 3 warunków jazdy, aby go unieruchomić, podczas gdy proponowany model narzuca cztery (TrslX, TrslZ) w dwóch punktach. Moja propozycja: użyj dwóch diametralnie przeciwstawnych punktów, aby zachować symetrię modelu, gdzie (TrslX, TrslZ) dla pierwszego i tylko (TrslX) dla drugiego.
Przyjrzałem się twojej konfiguracji symulacji i myślę, że rozumiem problem, z którym się borykasz. Kiedy naciskasz górną część statywu, spodziewasz się, że nogi rozsuną się na zewnątrz - trochę tak, jak może zachowywać się podstawa masztu flagowego, jeśli nie jest odpowiednio zakotwiczona. (Zabawne, przypomina mi to, jak niektóre amerykańskie flagi na elastycznych masztach uginają się pod wpływem wiatru – podobna koncepcja, inna skala!)
Z twojego opisu wynika, że warunki brzegowe mogą nadmiernie ograniczać stopy. Jeśli stopy są « zgniatane », ale nie poruszają się na zewnątrz, sprawdź, czy:
Przypadkowo ustawiłeś zbyt wiele stopni swobody u podstawy — nawet małe ograniczenia mogą uniemożliwić oczekiwany ruch na zewnątrz.
Jeśli używasz zespołu, między częściami znajdują się definicje kontaktów — upewnij się, że jest miejsce na realistyczny ruch.
Niecylindryczna geometria stopy utrudnia stosowanie standardowych podpór typu « stała powierzchnia » lub « rolka/suwak ». W takim przypadku rozważ użycie zdalnego przemieszczenia lub geometrii odniesienia , aby zasymulować realistyczne zachowanie stopy bez nadmiernego ograniczania.
Jeżeli używany jest SolidWorks Premium, należy spróbować użyć nieliniowej analizy statycznej , jeżeli oczekuje się, że deformacja będzie duża.
Zapraszam do udostępnienia większej liczby zrzutów ekranu lub szczegółów konfiguracji — chętnie pomogę w przyszłości.