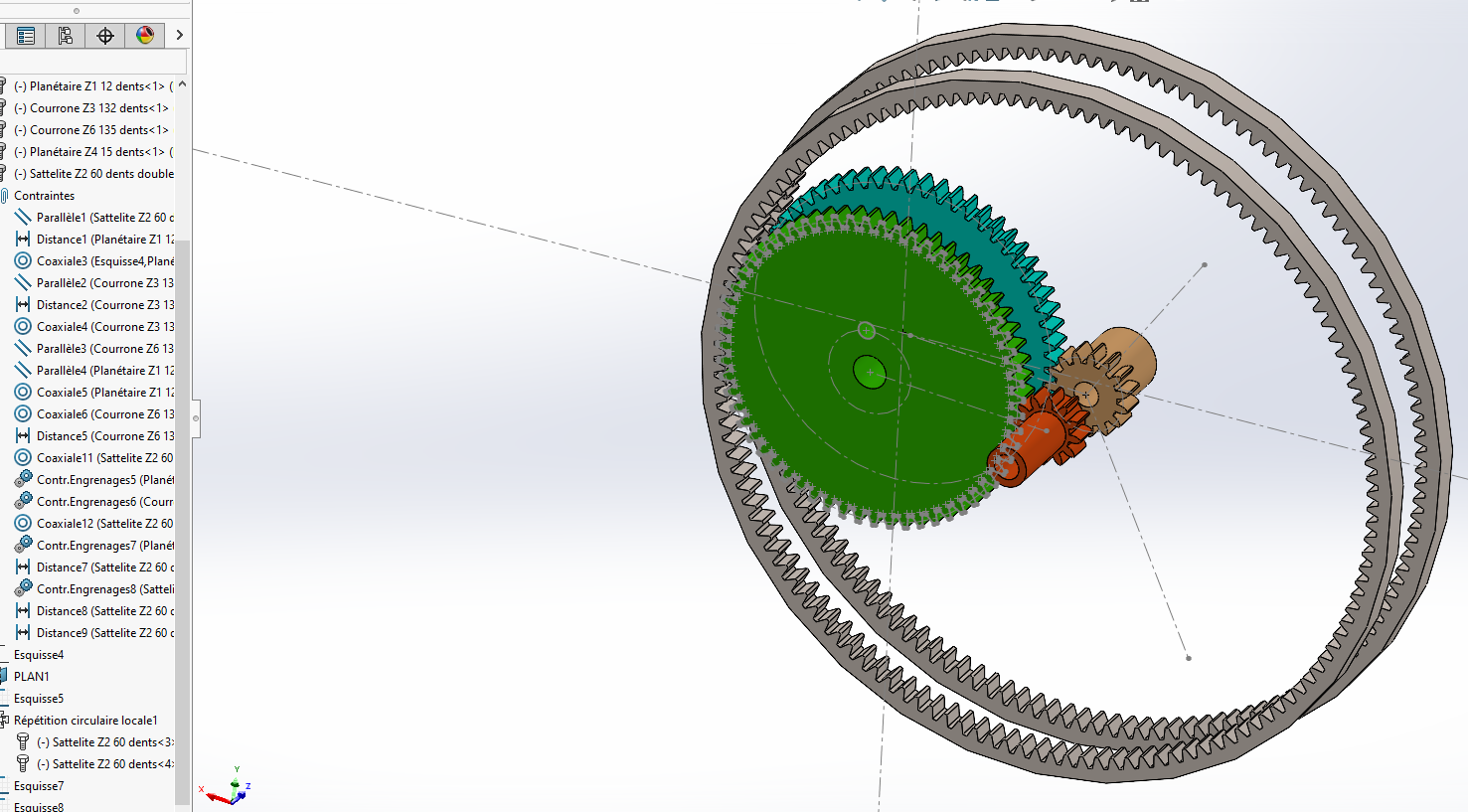
Um die theoretische Formel zu validieren, habe ich meinen doppelten epizyklischen Zug unter Solidworks modelliert, ich stehe vor einem Problem der Einschränkungen, wenn ich wie in der Realität die Übertragung der mechanischen Kraft zwischen meinen beiden Satelliten durch eine Koaxialität meiner Bohrung nicht mehr Bewegung möglich verbinde ..., ich werde natürlich 3 Satelliten pro Zugstufe hinzufügen, aber im Moment stecke ich an der Kreuzung der beiden Züge fest ... Ich bitte um Hilfe, wenn die Lösung einfach zu erwägen ist. in Pack and go mein digitaler Zwilling. Vielen Dank im Voraus. Herzliche Grüße.
Angesichts der Anzahl der Zähne der Räder kann keine Koaxialität zwischen den beiden Satelliten auferlegt werden, es sei denn, das Ganze ist bewegungsunfähig...
Um ein grundlegendes Planetengetriebe zu definieren, benötigen Sie mindestens einen Eingangsplaneten, einen Ausgangsplaneten, einen Satelliten und einen Satellitenträger. Letzteres wird in der Regel als Ausstiegsbewegung aus dem Zug gewählt. Dieser Satellitenträger existiert in Ihrem Modell nicht...
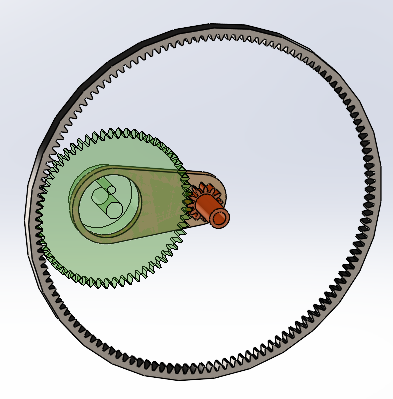
Wenn der Zug doppelt ist (2 Übertragungsstufen), können wir uns vorstellen, dass der Ausgang des ersten Zuges (PS1-Satellitenträger) mit dem planetaren Eingang des zweiten verbunden ist. Und dass die beiden Kronen wahrscheinlich fest (gebaut) sind. Wenn diese Annahmen zutreffen, verfügt das System tatsächlich über eine einfache Beweglichkeit und ein Übersetzungsverhältnis von 1:53,33 (siehe Video).
Ja, das habe ich durch die Definition einer Koaxialitätsbeschränkung erreicht... Danke, ich ändere und füge den Satellitenhalter hinzu. Ich werde der Modellierung des Videos folgen. Herzliche Grüße.