Hallo an alle
Ich befinde mich derzeit in einem persönlichen Projekt eines Siebdrehsystems (90°-Drehung), das über Arduino mit PAP-Motor und elektrischem Aktuator gesteuert wird, um die Position zu blockieren.
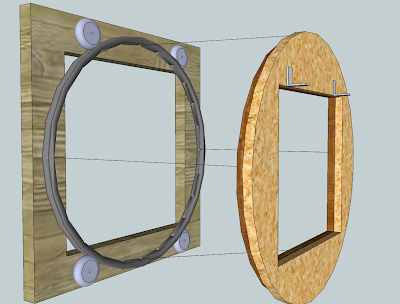
Um dies zu tun, beginne ich mit einem System, das im Netz gefunden wurde:
 (Bild aus dem Netz)
(Bild aus dem Netz)
Ich habe natürlich alle meine Komponenten modelliert: die Fahrradfelge / die Rollenräder / den Bildschirm, jetzt brauche ich nur noch die Verkleidungen.
Ich würde es begrüßen, wenn es möglich ist, das für den PAP-Motor erforderliche Drehmoment für die Drehung meines Bildschirms zu bestimmen (er wird eine Verbindung haben, die zur Drehachse zentriert ist, und keine Scherkraft). Haben Sie eine Lösung über eine Simulationsstudie?
Natürlich bitte ich Sie nicht, meine Arbeit zu machen, sondern nur eine helfende Hand :). Vielen Dank im Voraus und einen schönen Tag.
PS: Morgen werde ich weitere aussagekräftige Bilder hinzufügen.
1 „Gefällt mir“
Guten Abend
Wie schwer ist das Teil, das gedreht werden muss?

Der Bildschirm direkt darüber liegt bei 4391 Gramm
und ich schätze den CP, auf den er festgesetzt ist, auf 4000 Gramm
1 „Gefällt mir“
Ich habe das gefunden:
http://calibra-classic.org/pages/powerNTorque.htm
http://ancrobot.free.fr/fiches/pdf/index%283%29.pdf
http://forums.futura-sciences.com/physique/130566-calcul-couple-moteur.html
Danke, es ist schön, dass ich das alles lesen werde, um mir das alles zu merken, aber mein Ziel ist es, das notwendige Drehmoment über Solidworks zu bestimmen.
Es spielen viele Parameter eine Rolle, die Masse wird von den Führungen getragen, die Reibung ... Aber in der Idee möchte ich Berechnungen dieser Art auf andere Vorstellungen anwenden, daher meine Frage.
Hallo
Was für das Mitreißen eines rotierenden Festkörpers zählt, ist die Trägheit. Die Funktion Masseneigenschaften von SOLIDWORKS gibt Ihnen die Trägheit (auf den Hauptachsen, in Bezug auf die Achsen des Koordinatensystems...)
Dann liegt es an Ihnen, das gute alte Prinzip der Dynamik unter Berücksichtigung der Reibung anzuwenden, ansonsten können Sie eine Bewegungssimulation mit Motion durchführen
sim_mvt.jpg
Hallo Yoann, danke, das ist genau das, was ich suche.
Ich werde eine MOTION-Simulation ausprobieren, habe dieses Modul noch nie ausprobiert (sonst hätte ich im schlimmsten Fall die Bodeneigenschaft, da ich das Modell richtig entworfen habe, befindet sich meine Achse auf Höhe der :P Achse).
Danke, ich werde das Ergebnis dieses Wochenende oder Montag ;) wieder posten.
Hallo Yoan,
Im Anschluss an Ihren Beitrag habe ich versucht, eine Rotationsstudie meines Systems über MOTION durchzuführen:
- System reduziert auf einfache bewegliche Komponenten
- keine Berücksichtigung von Reibung
-natürlich unter Berücksichtigung der Ernsthaftigkeit
- Motor hinten auf einer Fläche proportional zur tatsächlichen Gliederabstützung (separate Fläche)
Hier ist das Ergebnis:

Das macht mich 477 N-mm, was (wenn ich richtig umgerechnet habe) 4.8kg.cm ergibt.
Das kommt mir seltsam vor, was denken Sie? (Längst habe ich meine Pfoten nicht mehr zu zweit gesteckt.
Ich habe mir auch die Eigenschaften von Massen angesehen:

dort sehe ich proportional keinen Zusammenhang mit dem MOTION-Ergebnis. Können Sie mir ein wenig bei der Interpretation helfen? (die Ergebnisse sind immer kompliziert, und da ich noch nie Bewegung verwendet habe, verlasse ich mich lieber auf erfahrene Leute)
Vielen Dank im Voraus und einen schönen Tag