Hello everyone,
I am currently in a personal project of a screen turning system (90° rotation) controlled via arduino with PAP motor and electric actuator to block position.
To do this, I start with a system found on the net:
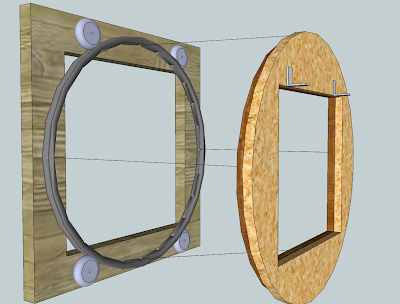 (image from the net)
(image from the net)
I obviously modeled all my components: the bike rim / the roller wheels / the screen, all I need now is the panels.
I would like if it is possible to determine the torque necessary for the PAP motor for the rotation of my screen (it will have a link centered to the axis of rotation and no shear force). Do you have a solution via a simulation study?
Obviously I'm not asking you to do my job but just a helping hand :). Thank you in advance and have a good day.
PS: tomorrow I'll add more telling images.
1 Like
Good evening,
What is the weight of the part that needs to be rotated?

the screen just above is at 4391 grams
and I estimate the CP on which it is fixed at 4000 grams
1 Like
I found this:
http://calibra-classic.org/pages/powerNTorque.htm
http://ancrobot.free.fr/fiches/pdf/index%283%29.pdf
http://forums.futura-sciences.com/physique/130566-calcul-couple-moteur.html
Thank you it's nice I'll read all this to remember all this, but my goal is to determine the necessary torque via solidworks.
A lot of parameters come into play, the mass is carried by the guides, the friction ... But in the idea I want to apply calculations of this type to other conceptions, hence my question.
Hello
What counts for the entrainment of a rotating solid is inertia. The Mass Properties function of solidworks gives you the inertia (on the main axes, with respect to the axes of the coordinate system...)
Then it's up to you to apply the good old principle of dynamics by taking into account friction, otherwise you can do a motion simulation with Motion
sim_mvt.jpg
Hello Yoann, thank you, that's exactly what I'm looking for.
I'm going to try a MOTION simulation, never tried this module (otherwise at worst I'd have the ground property, since I designed the model properly my axis is at the level of the :P axis).
Thank you, I'll post the result again this weekend or Monday ;).
Hello Yoan,
Following your post I tried to do a rotation study of my system via MOTION:
- System reduced to simple moving components
- no consideration of friction
-taking into account the seriousness of course
- motor set at the rear on a surface proportional to the actual link support (separate surface)
Here is the result:

Which makes me 477 N-mm, which makes (if I converted correctly) 4.8kg.cm.
It seems strange to me as a result, what do you think? (long since I haven't put my paws in couples.
I also looked at the properties of masses:

there proportionally I don't see any connection with the MOTION result. Could you give me a little helping hand in terms of interpretation? (always complicated the results, and as I have never used motion, I prefer to rely on experienced people)
Thank you in advance, and have a good day