Witam wszystkich,
Obecnie jestem w trakcie realizacji osobistego projektu systemu obracania ekranu (obrót o 90°) sterowanego przez arduino z silnikiem PAP i siłownikiem elektrycznym do pozycji blokowej.
Aby to zrobić, zaczynam od systemu znalezionego w sieci:
 (zdjęcie z sieci)
(zdjęcie z sieci)
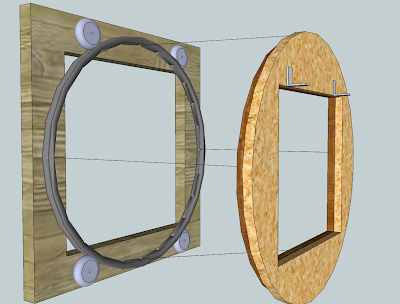
Oczywiście wymodelowałem wszystkie moje komponenty: obręcz roweru / koła rolkowe / ekran, wszystko, czego teraz potrzebuję, to panele.
Chciałbym, aby możliwe było określenie momentu obrotowego niezbędnego dla silnika PAP do obrotu mojego ekranu (będzie miał łącznik wyśrodkowany do osi obrotu i brak siły ścinającej). Czy masz rozwiązanie w postaci badania symulacyjnego?
Oczywiście nie proszę Cię o wykonanie mojej pracy, ale po prostu o pomocną dłoń :). Z góry dziękuję i życzę miłego dnia.
PS: jutro dodam więcej wymownych zdjęć.
1 polubienie
Dobry wieczór
Jaka jest waga części, którą należy obrócić?

Ekran tuż powyżej ma 4391 gramów
a CP, na którym jest ustalony, szacuję na 4000 gramów
1 polubienie
Znalazłem to:
http://calibra-classic.org/pages/powerNTorque.htm
http://ancrobot.free.fr/fiches/pdf/index%283%29.pdf
http://forums.futura-sciences.com/physique/130566-calcul-couple-moteur.html
Dziękuję, miło jest przeczytać to wszystko, aby to wszystko zapamiętać, ale moim celem jest określenie niezbędnego momentu obrotowego za pomocą solidworks.
W grę wchodzi wiele parametrów, masa jest przenoszona przez prowadnice, tarcie ... Ale w tej idei chcę zastosować tego typu obliczenia do innych koncepcji, stąd moje pytanie.
Witam
To, co liczy się dla porywania obracającego się ciała stałego, to bezwładność. Funkcja Właściwości masy w solidworks podaje bezwładność (na głównych osiach, w odniesieniu do osi układu współrzędnych...)
Następnie od Ciebie zależy, czy zastosujesz starą, dobrą zasadę dynamiki, biorąc pod uwagę tarcie, w przeciwnym razie możesz przeprowadzić symulację ruchu za pomocą Motion
sim_mvt.jpg
Witaj Yoann, dziękuję, to jest dokładnie to, czego szukam.
Zamierzam spróbować symulacji RUCHU, nigdy nie próbowałem tego modułu (w przeciwnym razie w najgorszym przypadku miałbym właściwość gruntu, ponieważ prawidłowo zaprojektowałem model, moja oś znajduje się na poziomie osi :P).
Dziękuję, opublikuję wynik ponownie w ten weekend lub w poniedziałek ;).
Witaj Yoan,
Po Twoim poście próbowałem przeprowadzić badanie rotacji mojego systemu za pomocą MOTION:
- System zredukowany do prostych ruchomych elementów
- brak uwzględniania tarcia
-biorąc oczywiście pod uwagę powagę
- silnik ustawiony z tyłu na powierzchni proporcjonalnej do rzeczywistego podparcia ogniwa (oddzielna powierzchnia)
Oto wynik:

Co daje mi 477 N-mm, co daje (jeśli poprawnie przeliczyłem) 4.8kg.cm.
W związku z tym wydaje mi się to dziwne, co o tym sądzisz? (dawno nie wkładałem łap w pary.
Przyjrzałem się również własnościom mas:

tam proporcjonalnie nie widzę żadnego związku z wynikiem MOTION. Czy mógłby mi Pan/Pani pomóc w kwestii interpretacji? (zawsze komplikował wyniki, a ponieważ nigdy nie korzystałem z ruchu, wolę polegać na doświadczonych osobach)
Z góry dziękuję i życzę miłego dnia