Door twee heftafelontwerpen parallel te ontwikkelen, wil ik de verankeringspositie van mijn hydraulische cilinder automatisch kunnen implementeren, dit is de eerste stap om de keuze voor kinematica te rechtvaardigen. In dit stadium is het parallellogram mogelijk ten opzichte van de dubbele schaar. Kunnen we de ankerpunten van de cilinder instellen en een ontwerpstudie starten, ik heb minimale ervaring met deze module, die alleen wordt gebruikt om massacentra te optimaliseren door schaalbare modellen te genereren. Bedankt voor al het advies en de aanpak om te overwegen. Het mechanische deel op de krachten in de verbindingen Heftafel N°1 Dubbele schaar 730V.SLDPRT (56,2 KB) Heftafel nr. 1 Dubbele schaar. SLDPRT (57.2 KB) Prototype heftafel nr. 2 parallellogram cilinder 500.SLDPRT (93.8 KB) Prototype heftafel nr. 2 parallellogram. SLDPRT (52.8 KB) Op dit moment niet nodig.
Je bent erg vaag over de doelen die je stelt voor je ontwerpstudie. Dit is het eerste dat u in een studie van dit type moet definiëren, evenals de parameters die u als input het meest relevant beschouwt. Vervolgens stelt de door SolidWorks voorgestelde ontwerpstudie u in staat om de respons van de " objectieve " parameters van uw systeem te bestuderen, afhankelijk van de variatie van de invoerparameters.
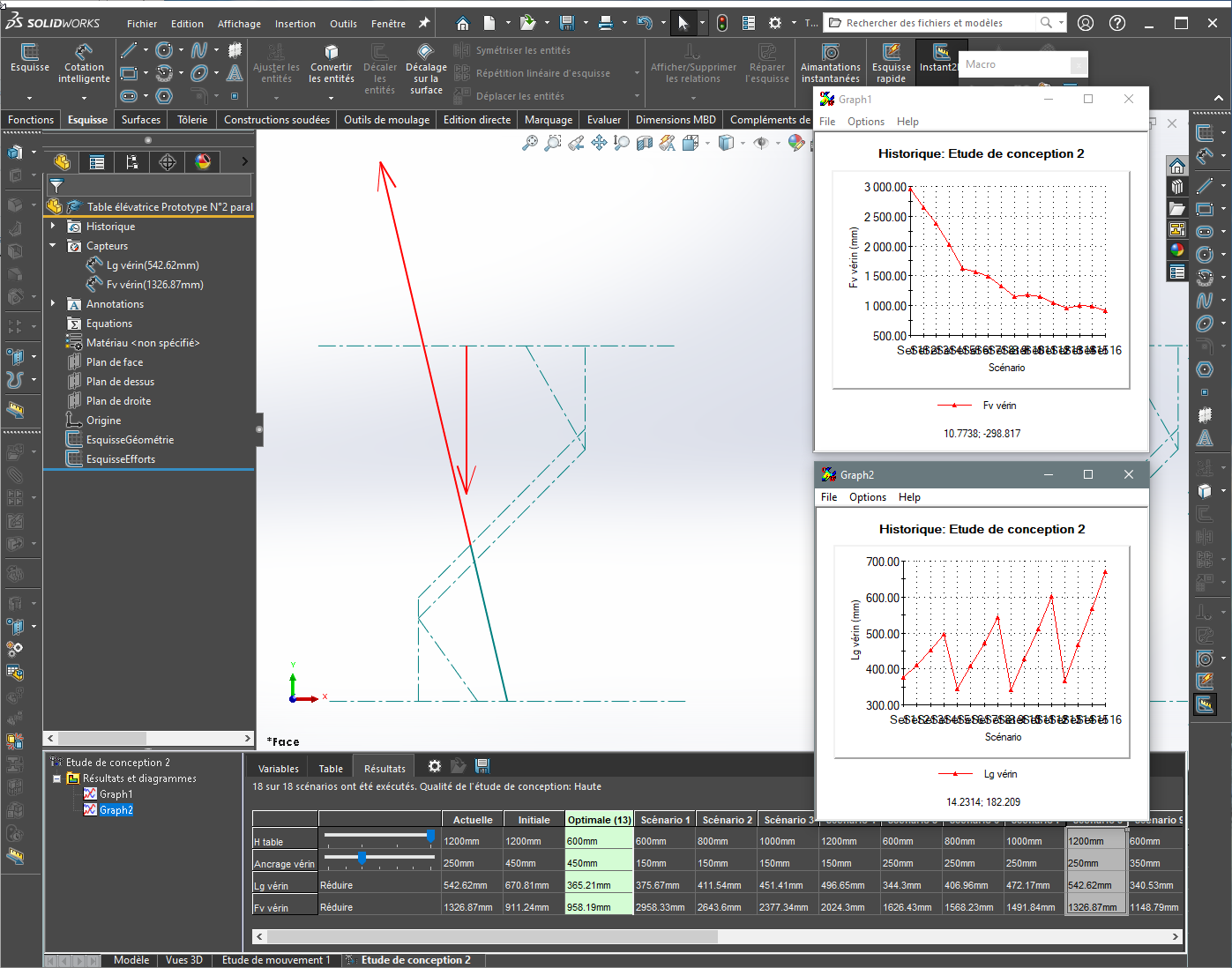
Met alleen zijn diagram heb ik een eenvoudige kinematische/statische studie uitgevoerd op een van uw modellen, waarbij ik als doelstellingen de slag van de cilinder (in feite de lengte) en de kracht die deze zal moeten uitoefenen onder een belasting van 500 daN. De invoerparameters zijn de hoogte van de tafel, variërend van 600 tot 1200 mm, en de positie van het ankerpunt op de bovenste balk van het parallellogram (variërend van 150 tot 450 mm).
De resultaten kunnen grafisch worden geanalyseerd: curven van de kracht van de cilinder en de lengte ervan in functie van het scenariogetal. Waarbij het niet verwonderlijk is om te zien dat hoe groter de slag van de cilinder, hoe lager de inspanning die deze moet uitoefenen. Het enige dat overblijft is het kiezen van het type cilinder (elektrisch, hydraulisch, enz.) en de juiste referentie.
In feite is mijn doel in de voorbereidende fase om de efficiëntie van de ene kinematische structuur te kunnen classificeren ten opzichte van de andere door hier een type actuator, de cilinder en zijn technologie vervolgens op te nemen door te kijken naar de handleidingen van de fabrikanten. Mijn huidige moeilijkheid is om de meest gunstige criteria uit het 3D-model te halen:
gebruik een dimension socket op het 3D-model dat ik ga gebruiken.
Definieer terminals (de tool is moeilijker te configureren) Leid dan een ontwerpvoorstel af, ik ben niet bevriend met de ontwerpstudie maar ik ga er wel aan werken met de elementen die je meeneemt. Bedankt voor het proces en ik zal het bericht op het forum bijwerken.
Ik ga voortbouwen op je werk door sensoren te gebruiken en in te stellen, bedankt, ik gebruik deze optie niet. Een laatste vraag, kunnen de sensoren worden gebruikt met statische weerstandssimulatiegegevens, omdat ik een week lang bezig ben geweest met de vergelijkende studie van een boutconstructie versus een gelaste assemblage door mijn kinematisch diagram lokaal te wijzigen, om een transport te hebben tegen lagere kosten en in geleverd formaat.
Zo ja, dan zal ik in dit geval een aanvullende benadering van het gebruik van een balk voorstellen, deze geparametriseerd om volgens de krachten de minimale dikte te verkrijgen die is aangepast om een eco-designcriterium te hebben, waardoor de totale massa van het object in de voorlopige ontwerpfase wordt geminimaliseerd. (Ik houd rekening met de veiligheidsfactor in de preambule). Een diktesensor is mogelijk en ik geef hem minimale klemmen, maximaal in verhouding tot de gegenereerde beperkingen. Dit is mijn huidige voortgang van de tool en ik ben erg blij met de mogelijkheden die worden geboden in de onderzoeksfase en met uw hulp. Vriendelijke groeten.