Opracowując równolegle dwie konstrukcje stołu podnośnego, chciałbym mieć możliwość automatycznego wdrożenia pozycji kotwienia mojego siłownika hydraulicznego, jest to pierwszy krok uzasadniający wybór kinematyki. Na tym etapie możliwy jest równoległobok w stosunku do podwójnych nożyczek. Czy możemy ustawić punkty kotwiczenia cylindra i uruchomić studium projektowe, mam minimalne doświadczenie z tym modułem, służącym jedynie do optymalizacji środków ciężkości poprzez umożliwienie generowania skalowalnych modeli. Dziękuję za wszystkie rady i podejście do rozważenia. Część mechaniczna dotycząca sił w połączeniach Podnośnik nożycowy nr 1 730V.SLDPRT (56.2 KB) Stół podnośny nr 1 Podwójne nożyce. SLDPRT (57.2 KB) Prototyp siłownika równoległobocznego stołu nr 2 500.SLDPRT (93.8 KB) Prototypowy równoległobok stołu podnośnego nr 2. SLDPRT (52.8 KB) W tym momencie nie jest to konieczne.
Jesteś bardzo niejasny co do celów, które wyznaczasz dla swojego badania projektowego. Jest to pierwsza rzecz, którą należy zdefiniować w badaniu tego typu, a także parametry, które uważa się za najbardziej istotne jako dane wejściowe. Następnie, badanie projektowe zaproponowane przez SolidWorks pozwala na zbadanie odpowiedzi " obiektywnych " parametrów systemu, zgodnie ze zmiennością parametrów wejściowych.
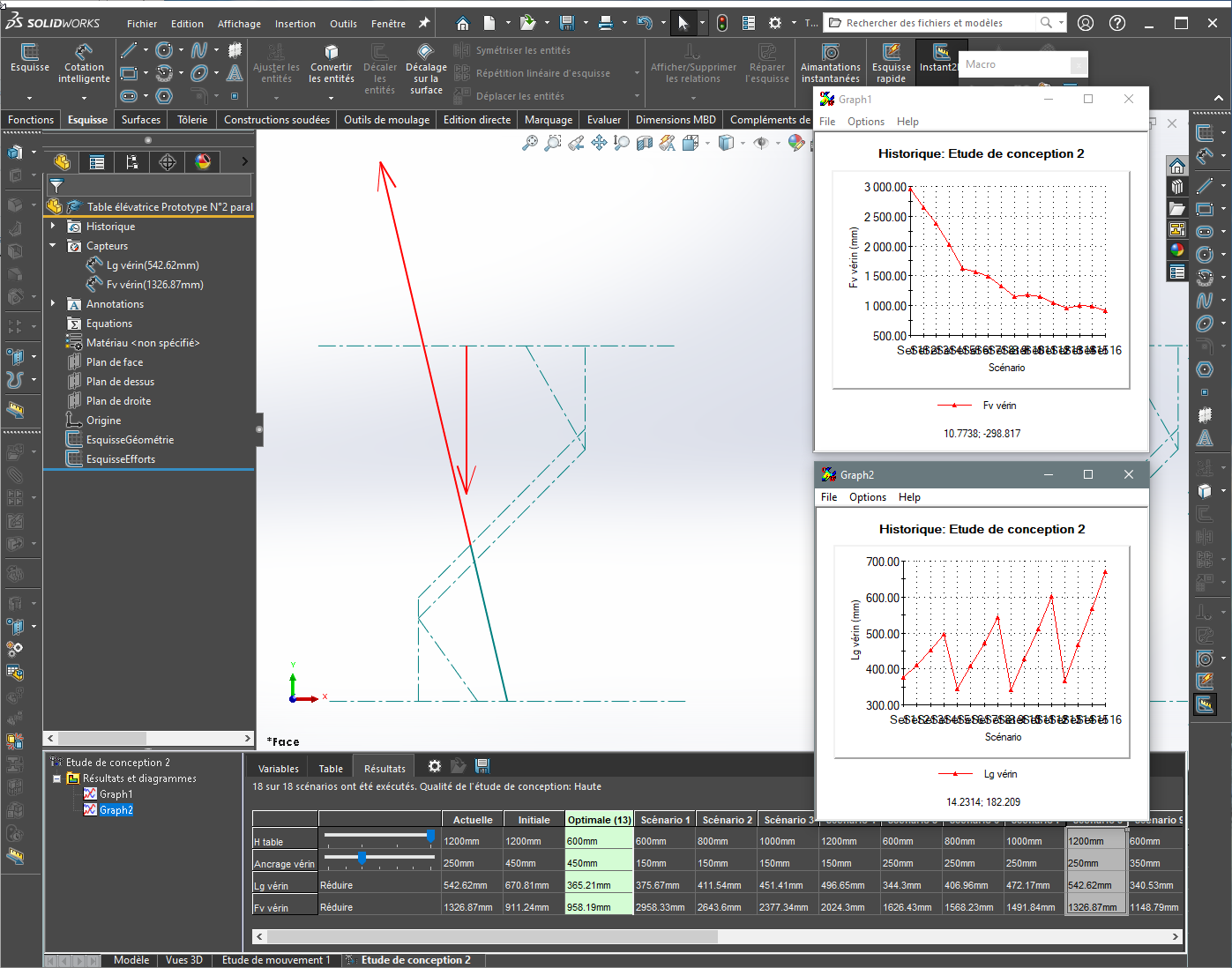
Mając tylko jego diagram, przeprowadziłem proste badanie kinematyczno-statyczne na jednym z Waszych modeli, ustalając jako cele skok cylindra (a właściwie jego długość) i siłę, jaką będzie musiał wywierać pod obciążeniem 500 daN. Parametrami wejściowymi są wysokość stołu, wahająca się od 600 do 1200 mm, oraz położenie punktu kotwiczenia na górnym pręcie równoległoboku (w zakresie od 150 do 450 mm).
Wyniki można analizować graficznie: krzywe siły działającego walca i jego długości w funkcji numeru scenariusza. Gdzie nie jest zaskakujące, że im większy skok cylindra, tym mniejszy wysiłek, jaki musi on wywierać. Pozostaje tylko wybrać typ siłownika (elektryczny, hydrauliczny itp.) i odpowiednie odniesienie.
W rzeczywistości moim celem w fazie wstępnej jest możliwość sklasyfikowania sprawności jednej konstrukcji kinematycznej w porównaniu z inną poprzez uwzględnienie tutaj typu siłownika, siłownika i jego technologii, a następnie przyjrzenia się prowadnicom producentów. Moja obecna trudność polega na tym, aby uzyskać najkorzystniejsze kryteria z modelu 3D:
użyj gniazda wymiarowego na modelu 3D, którego zaczynam używać.
Zdefiniuj terminale (narzędzie jest trudniejsze do skonfigurowania) Następnie wydedukuj propozycję projektu, nie jestem przyjacielem studium projektowego, ale będę nad nim pracować z elementami, które przyniesiesz. Dziękuję za proces i zaktualizuję post na forum.
Zamierzam opierać się na twojej pracy, używając i ustawiając czujniki, dzięki, nie używam tej opcji. Ostatnie pytanie, czy czujniki mogą być używane z danymi symulacyjnymi oporu statycznego, ponieważ od tygodnia prowadzę badanie porównawcze zespołu śrubowego w porównaniu z zespołem spawanym, zmieniając lokalnie mój wykres kinematyczny, aby mieć transport w obniżonych kosztach i w dostarczonym formacie.
Jeśli tak, to w tym przypadku przedstawię komplementarne podejście do zastosowania belki, tym sparametryzowanym w celu uzyskania zgodnie z siłami jej minimalnej grubości dostosowanej do spełnienia kryterium ekoprojektu, minimalizując całkowitą masę obiektu w fazie projektowania wstępnego. (Biorę pod uwagę czynnik bezpieczeństwa w preambule). Czujnik grubości jest możliwy i daję mu minimalne zaciski, maksimum w stosunku do generowanych ograniczeń. To jest mój obecny postęp w pracy nad narzędziem i jestem bardzo zadowolony z możliwości oferowanych w fazie badawczej oraz z Twojej pomocy. Pozdrowienia.