Dans le cadre d’un projet de modélisation 3D et d’analyse cinématique de la main (modèle ci-joint que j’ai trouvé sur GrabCAD), je me demandais quelles seraient les meilleures contraintes à utiliser pour les articulations, car j’ai besoin de la faire bouger par la suite.
Alors voici une petite vidéo que peut-être cela pourrai t’aider.=>Zygote Human Factors | Scalable and Posable Humans for SOLIDWORKS
Sinon pour chaque doigt, tu peux déjà mètre un contrainte de coaxialité avec un certain déplacement limite. Je ne peux pas te faire des captures d’écran, car mon poste est en cours de traitement.
J’espère que quelqu’un te trouvera une solution.
Et voici la liste des contraintes sur solidworks=>Contraintes standard par entité - 2022 - Aide de SOLIDWORKS
Bon courage.
@+.
AR.
Je vous remercie pour votre réponse ! J’ai également envisagé d’ajouter des contraintes de coaxialité pour les doigts, mais cela ne semble pas fonctionner entre une sphère et le doigt. Selon vous, est-ce que cela devrait fonctionner où c’est moi qui l’utilise mal ?
Je ne sais pas ce que sont vos attentes en matière de simulation cinématique, mais le modèle que vous avez sélectionné me semble mal convenir pour cet usage :
il s’agit d’une pièce à corps multiples, format peu adapté à une étude de mouvement. Un assemblage serait plus indiqué;
les corps sont un mélange de volumes (sphères ?) et de surfaces complexes, difficilement exploitables pour définir des contraintes, des points et des axes particuliers pour les liaisons…
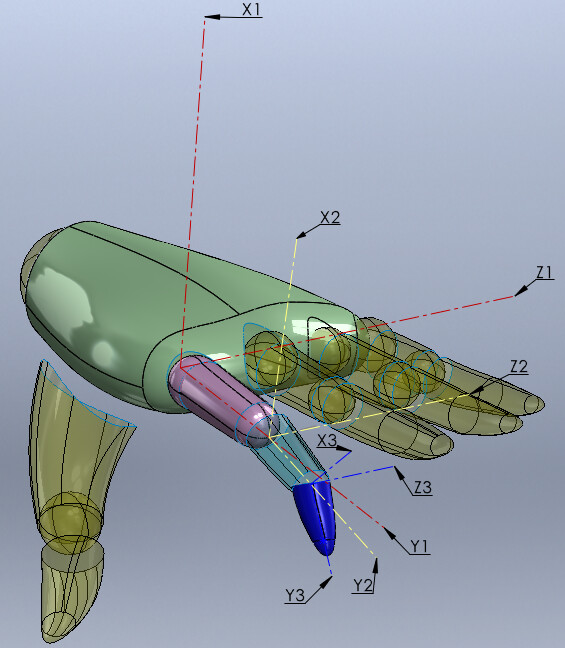
Pour ce qui concerne les degrés de liberté, un modèle classique est basé sur 4 DDL pour chaque doigt:
une rotation de la première phalange par rapport à la paume autour de l’axe X1 (« abduction-adduction ») ;
trois rotations des phalanges autour successivement de Z1, Z2 et Z3, qui constituent le mouvement de « flexion-extension » du doigt.
On peut considérer les trois rotations autour de X1, Z1 et Z2 comme indépendantes, la dernière autour de Z3 est liée aux deux précédentes…
Comme les 5 doigts sont similaires, le modèle comporte 20 degrés de liberté au total. Commande délicate avec les outils de simulation s’il s’agit de simuler une séquence de piano… Plus facile à envisager s’il s’agit simplement de fermer et ouvrir le poing. Cordialement.
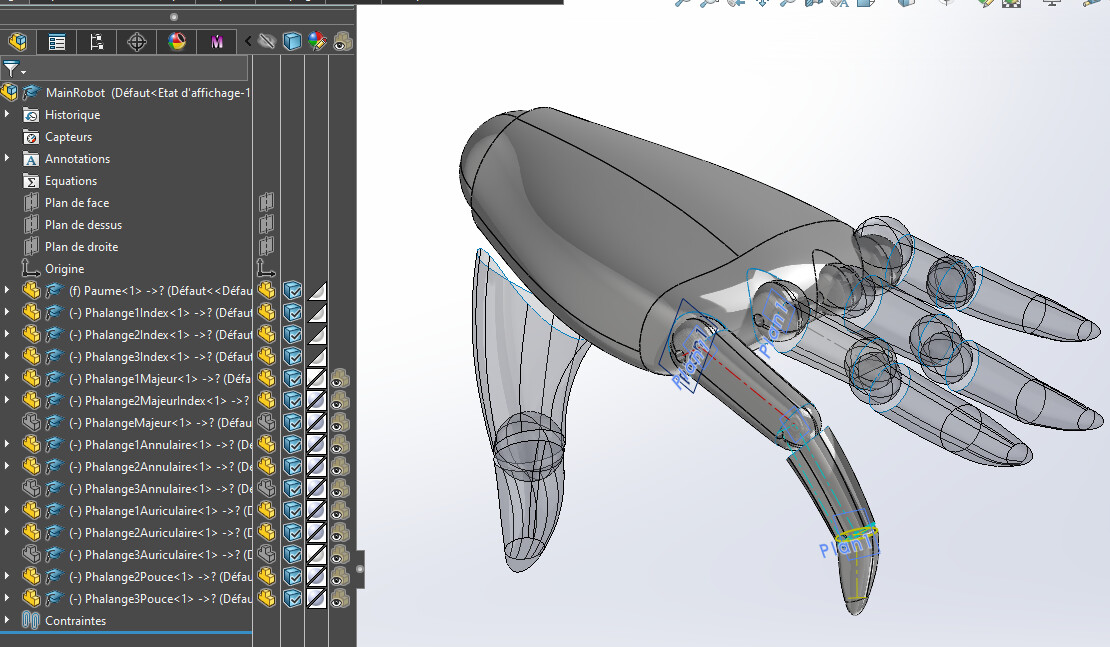
Merci pour votre réponse. J’ai isolé toutes les composantes du modèle que j’ai trouvé sur GrabCAD pour créer un assemblage. Ensuite, j’ajouterai des contraintes pour les faire bouger. Malheureusement, ma professeure insiste pour que j’utilise ce modèle, donc je n’ai pas vraiment le choix . Ensuite, je simulerai chaque mouvement, comme la fermeture des doigts pour former un poing ou l’ouverture pour obtenir une main plate. Selon vous, est-ce faisable sur SolidWorks ?
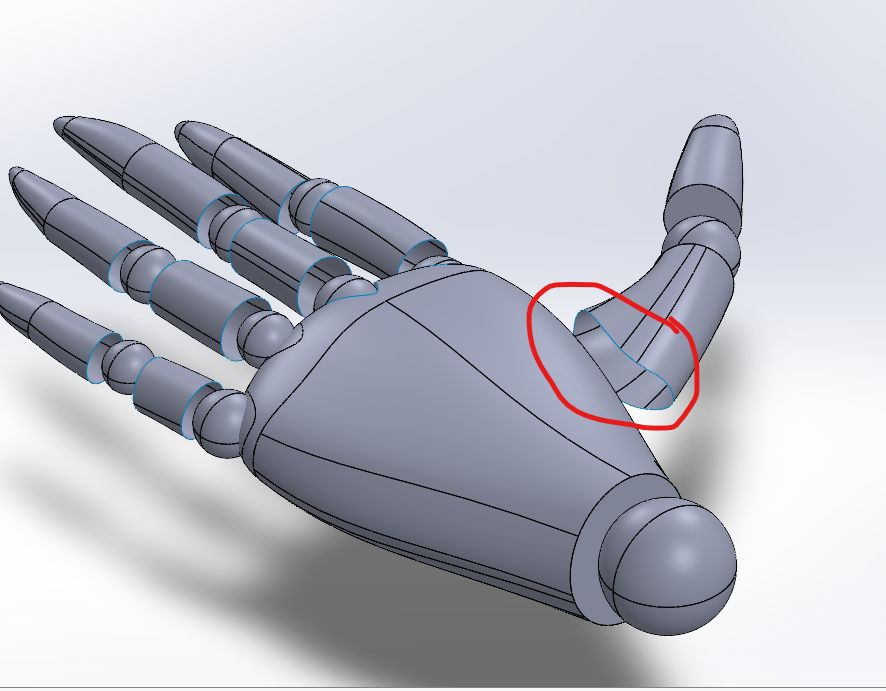
Pour illustrer ce que je dis, voici quelques images. Selon moi au niveau des doigts ce serait des pivots cylindriques donc des contraintes de coïncidences des axes. Toutefois, pour le pouce comme vous pouvez le voir sur les images je ne sais pas trop quoi mettre comme contraintes. Pourriez vous m’aider ?
Des corps surfaciques complexes et quelques corps volumiques (sphères) de dimensions et positions aléatoires : une véritable galère pour construire !
Vous ne disposez d’aucune des références géométriques « solides », du type points, axes, cylindres, plans… qui sont utilisées pour créer des contraintes de coaxialité ou de coïncidence de plans indispensables à la définition des mouvements relatifs entre la paume de la main et les phalanges des doigts.
Ajoutez à cela la nécessaire maîtrise d’un module de cinématique (lequel ?) pour piloter les 15 mouvements, vous êtes parti pour quelques heures de travail.
J’ai esquissé une solution limitée aux trois liaisons de l’index. Résultat pas très séduisant, mais qui peut aider à démarrer…
 Cordialement.
Cordialement.