Im Rahmen eines 3D-Modellierungs- und kinematischen Analyseprojekts der Hand (beigefügtes Modell, das ich auf GrabCAD gefunden habe) habe ich mich gefragt, was die besten Einschränkungen für die Gelenke wären, da ich sie danach in Bewegung bringen muss.
Hallo und herzlich willkommen Paradoxe06_paradoxe06,
Also, hier ist ein kleines Video, das dir vielleicht helfen kann.=>Zygote Human Factors | Skalierbare und bewegliche Menschen für SOLIDWORKS Andernfalls können Sie für jeden Finger bereits eine Koaxialitätsbeschränkung mit einer bestimmten Grenzverschiebung messen. Ich kann keine Screenshots für euch machen, da mein Beitrag gerade bearbeitet wird. Ich hoffe, dass jemand eine Lösung für Sie findet. Und hier ist die Liste der Abhängigkeiten auf solidworks=>Standard-Abhängigkeiten nach Element - 2022 - SOLIDWORKS Hilfe Viel Glück. @+. AR.
Vielen Dank für Ihre Antwort! Ich habe auch darüber nachgedacht, Koaxialitätsbeschränkungen für die Finger hinzuzufügen, aber es scheint zwischen einer Kugel und dem Finger nicht zu funktionieren. Glaubst du, dass es funktionieren sollte oder bin ich derjenige, der es schlecht benutzt?
Ich weiß nicht, was Ihre Erwartungen in Bezug auf die kinematische Simulation sind, aber das Modell, das Sie ausgewählt haben, scheint mir für diesen Einsatz ungeeignet zu sein:
Es ist eine Arbeit mit mehreren Körpern, ein Format, das sich nicht gut für eine Bewegungsstudie eignet. Eine Versammlung wäre angemessener;
Körper sind eine Mischung aus Volumen (Kugeln?) und komplexen Oberflächen, die schwer auszunutzen sind, um bestimmte Beschränkungen, Punkte und Achsen für die Verbindungen zu definieren...
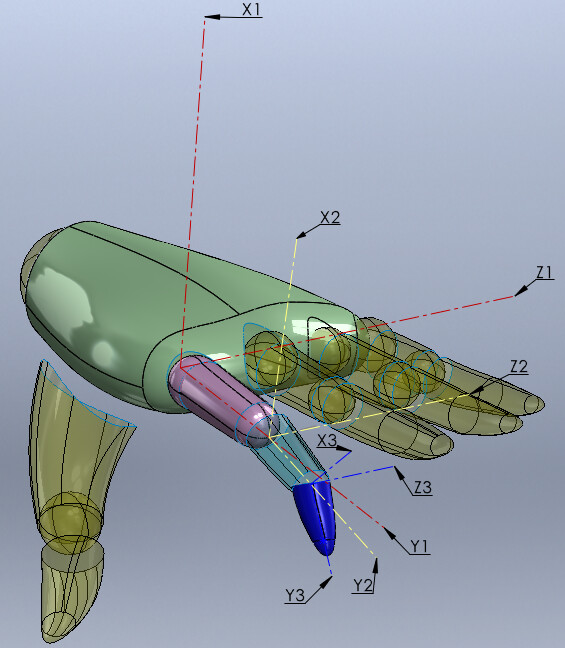
Was die Freiheitsgrade anbelangt, so basiert ein klassisches Modell auf 4 DDLs pro Finger:
eine Drehung der ersten Phalanx in Bezug auf die Handfläche um die X1-Achse (" Abduktions-Adduktion ");
drei aufeinanderfolgende Umdrehungen der Phalangen um Z1, Z2 und Z3, die die " Beuge-Streckung " -Bewegung des Fingers bilden. Wir können die drei Rotationen um X1, Z1 und Z2 als unabhängig voneinander betrachten, die letzte um Z3 ist mit den beiden vorherigen verwandt...
Da sich die 5 Finger ähneln, verfügt das Modell über insgesamt 20 Freiheitsgrade. Knifflige Steuerung mit den Simulationswerkzeugen, wenn Sie eine Klaviersequenz simulieren möchten... Leichter zu überlegen, wenn es nur darum geht, die Faust zu schließen und zu öffnen. Herzliche Grüße.
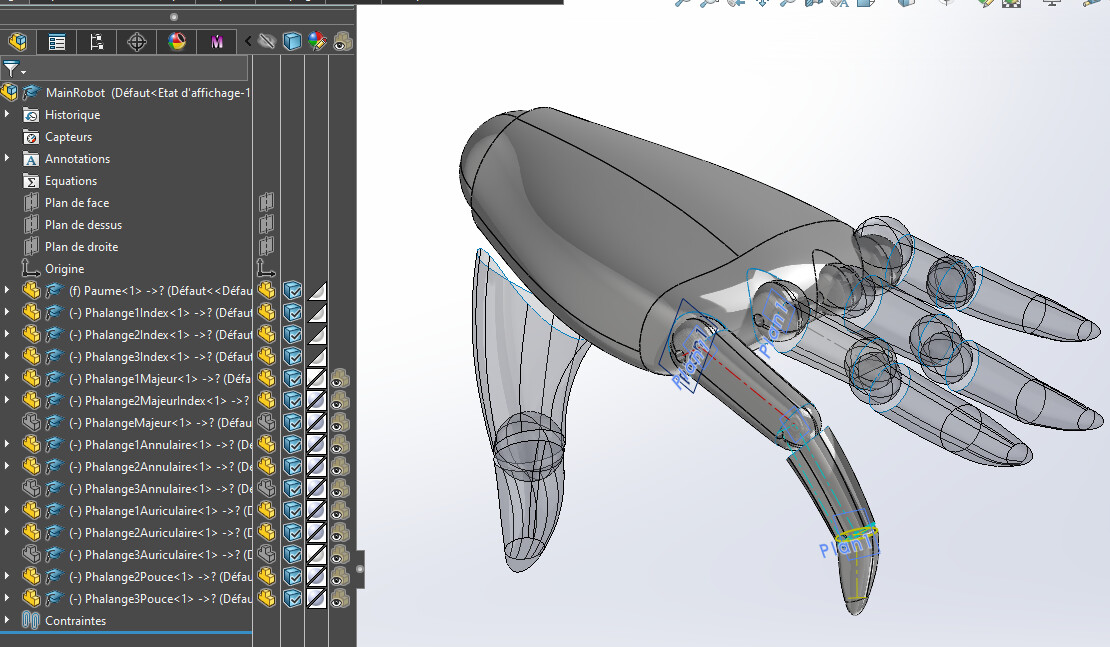
Vielen Dank für Ihre Antwort. Ich habe alle Komponenten des Modells, die ich in GrabCAD gefunden habe, isoliert, um eine Baugruppe zu erstellen. Dann füge ich Abhängigkeiten hinzu, um sie zu verschieben. Leider besteht mein Lehrer darauf, dass ich dieses Modell verwende, so dass ich nicht wirklich eine Wahl habe. Dann simuliere ich jede Bewegung, z. B. das Schließen meiner Finger zur Faust oder das Öffnen, um eine flache Hand zu bekommen. Ist das Ihrer Meinung nach mit SolidWorks machbar?
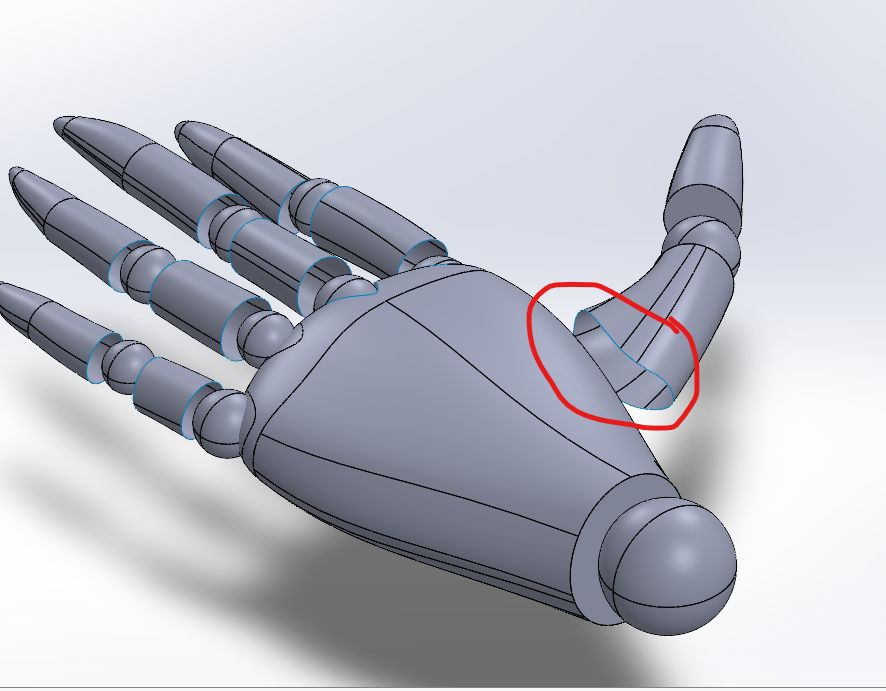
Um zu veranschaulichen, was ich sage, hier einige Bilder. Meiner Meinung nach wären es auf der Höhe der Finger zylindrische Drehpunkte, also Einschränkungen des Zusammentreffens der Achsen. Für den Daumen weiß ich jedoch, wie Sie auf den Bildern sehen können, nicht wirklich, was ich als Einschränkungen setzen soll. Können Sie mir helfen?
Komplexe Oberflächenkörper und einige Volumenkörper (Kugeln) mit zufälligen Abmessungen und Positionen: ein echter Aufwand zu bauen! Sie haben keine der " Volumenkörper " geometrischen Referenzen wie Punkte, Achsen, Zylinder, Ebenen usw. die verwendet werden, um Einschränkungen der Koaxialität oder des Zusammentreffens von Ebenen zu erzeugen, die für die Definition der Relativbewegungen zwischen der Handfläche und den Fingergliedern wesentlich sind. Hinzu kommt die notwendige Beherrschung eines Kinematikmoduls (welches?), um die 15 Bewegungen zu steuern, und schon kann es um ein paar Stunden Arbeit gehen. Ich habe eine Lösung skizziert, die sich auf die drei Links des Index beschränkt. Kein sehr attraktives Ergebnis, aber eines, das Ihnen den Einstieg erleichtern kann...
 Herzliche Grüße.
Herzliche Grüße.