As part of a 3D modeling and kinematic analysis project of the hand (attached model that I found on GrabCAD), I was wondering what would be the best constraints to use for the joints, because I need to make it move afterwards.
Thank you for your answer! I've also considered adding coaxiality constraints for the fingers, but it doesn't seem to work between a sphere and the finger. Do you think it should work or am I the one using it badly?
I don't know what your expectations are in terms of kinematic simulation, but the model you have selected seems to me to be ill-suited for this use:
It is a piece with multiple bodies, a format not well suited to a movement study. An assembly would be more appropriate;
bodies are a mixture of volumes (spheres?) and complex surfaces, difficult to exploit to define particular constraints, points and axes for the connections...
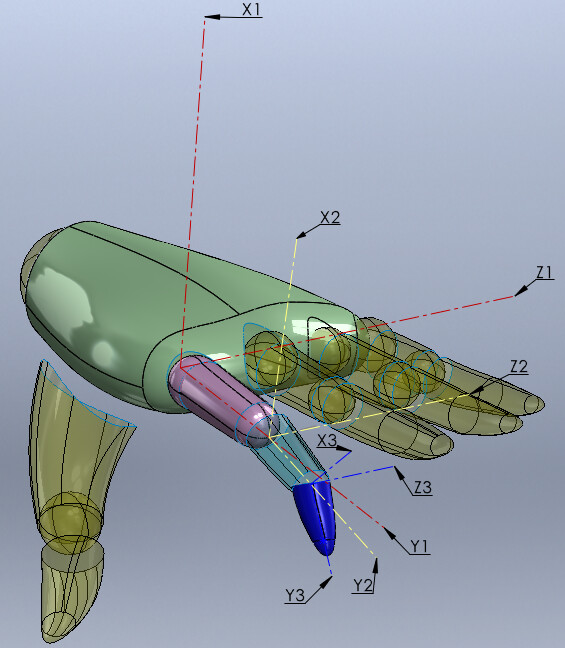
As far as degrees of freedom are concerned, a classic model is based on 4 DDLs for each finger:
a rotation of the first phalanx with respect to the palm around the X1 axis (" abduction-adduction ");
three rotations of the phalanges around Z1, Z2 and Z3 successively, which constitute the " flexion-extension " movement of the finger. We can consider the three rotations around X1, Z1 and Z2 as independent, the last one around Z3 is related to the two previous ones...
Since the 5 fingers are similar, the model has 20 degrees of freedom in total. Tricky control with the simulation tools if you want to simulate a piano sequence... Easier to consider if it is simply a matter of closing and opening the fist. Kind regards.
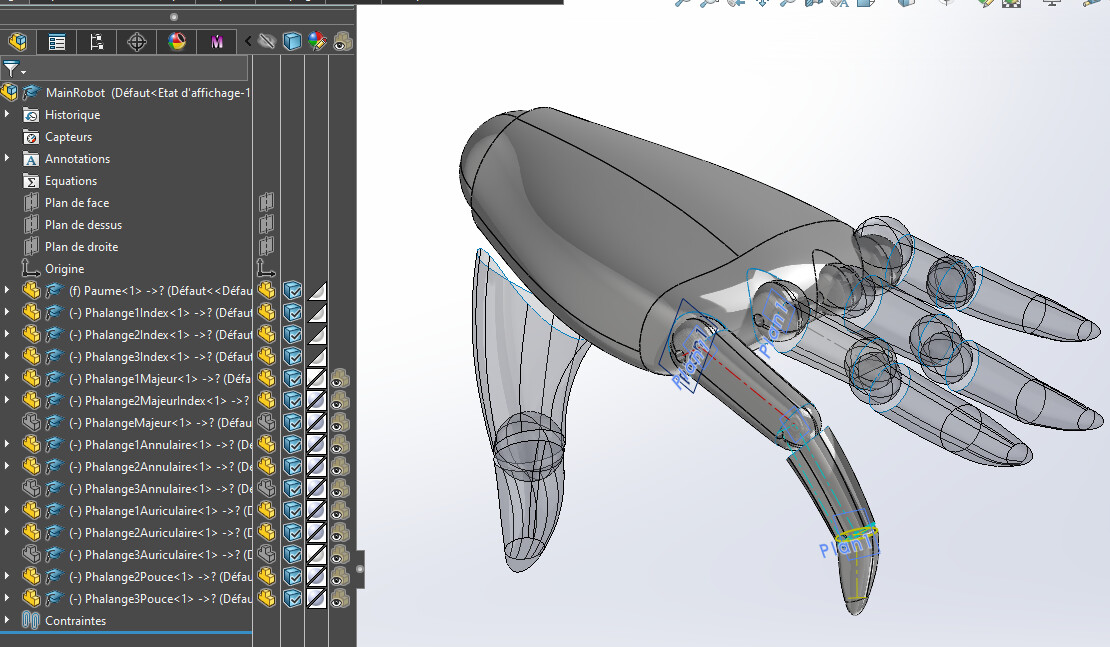
Thank you for your answer. I isolated all the components of the model that I found on GrabCAD to create an assembly. Then I'll add constraints to make them move. Unfortunately, my teacher insists that I use this model, so I don't really have a choice . Then I'll simulate each movement, such as closing my fingers to form a fist or opening to get a flat hand. In your opinion, is this feasible on SolidWorks?
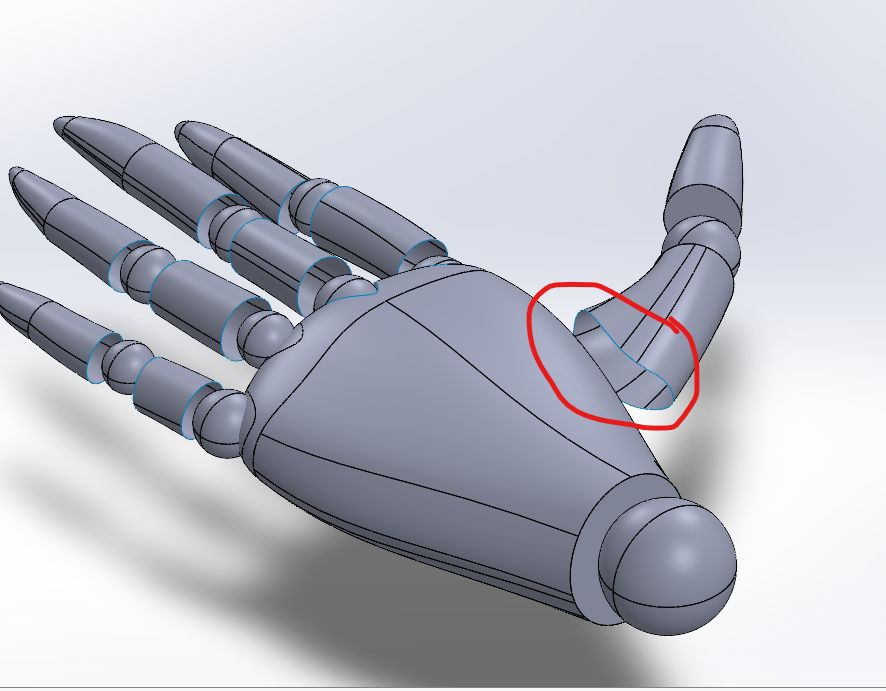
To illustrate what I am saying, here are some images. In my opinion, at the level of the fingers, they would be cylindrical pivots, so constraints of coincidence of the axes. However, for the thumb, as you can see on the images, I don't really know what to put as constraints. Could you help me?
Complex surface bodies and a few volume bodies (spheres) of random dimensions and positions: a real hassle to build! You do not have any of the " solid " geometric references, such as points, axes, cylinders, planes, etc. which are used to create constraints of coaxiality or coincidence of planes essential to the definition of the relative movements between the palm of the hand and the phalanges of the fingers. Add to that the necessary mastery of a kinematics module (which one?) to control the 15 movements, and you're off to a few hours of work. I have sketched out a solution limited to the three links of the index. Not a very attractive result, but one that can help you get started...
 Kind regards.
Kind regards.