Als onderdeel van een 3D-modellerings- en kinematisch analyseproject van de hand (bijgevoegd model dat ik op GrabCAD vond), vroeg ik me af wat de beste beperkingen zouden zijn om voor de gewrichten te gebruiken, omdat ik het daarna moet laten bewegen.
Dank u voor uw antwoord! Ik heb ook overwogen om coaxialiteitsbeperkingen voor de vingers toe te voegen, maar het lijkt niet te werken tussen een bol en de vinger. Vind je dat het zou moeten werken of ben ik degene die het slecht gebruikt?
Ik weet niet wat uw verwachtingen zijn op het gebied van kinematische simulatie, maar het model dat u hebt geselecteerd, lijkt mij niet geschikt voor dit gebruik:
Het is een stuk met meerdere lichamen, een formaat dat niet erg geschikt is voor een bewegingsstudie. Een vergadering zou passender zijn;
Lichamen zijn een mengeling van volumes (bollen?) en complexe oppervlakken, moeilijk te exploiteren om bepaalde beperkingen, punten en assen voor de verbindingen te definiëren...
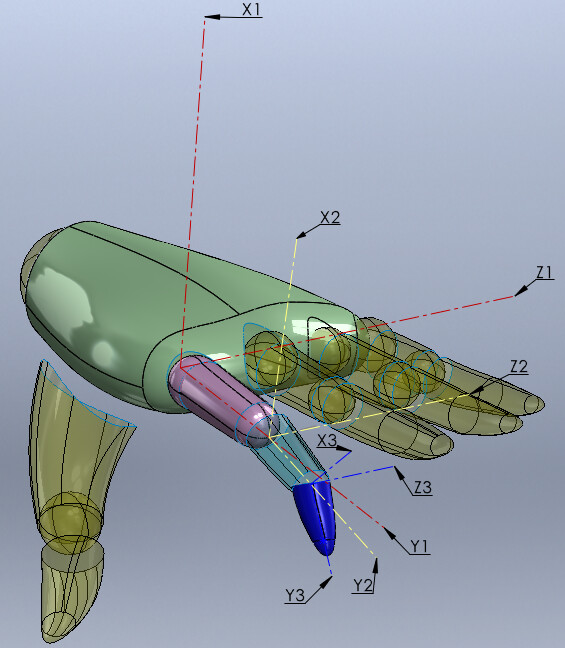
Wat vrijheidsgraden betreft, is een klassiek model gebaseerd op 4 DDL's voor elke vinger:
een rotatie van het eerste kootje ten opzichte van de handpalm rond de X1-as (" abductie-adductie ");
drie omwentelingen van de vingerkootjes rond Z1, Z2 en Z3 achtereenvolgens, die de " flexie-extensie " beweging van de vinger vormen. We kunnen de drie rotaties rond X1, Z1 en Z2 als onafhankelijk beschouwen, de laatste rond Z3 is gerelateerd aan de twee voorgaande...
Omdat de 5 vingers op elkaar lijken, heeft het model in totaal 20 vrijheidsgraden. Lastige besturing met de simulatietools als je een pianosequentie wilt simuleren... Gemakkelijker te overwegen als het gewoon een kwestie is van de vuist sluiten en openen. Vriendelijke groeten.
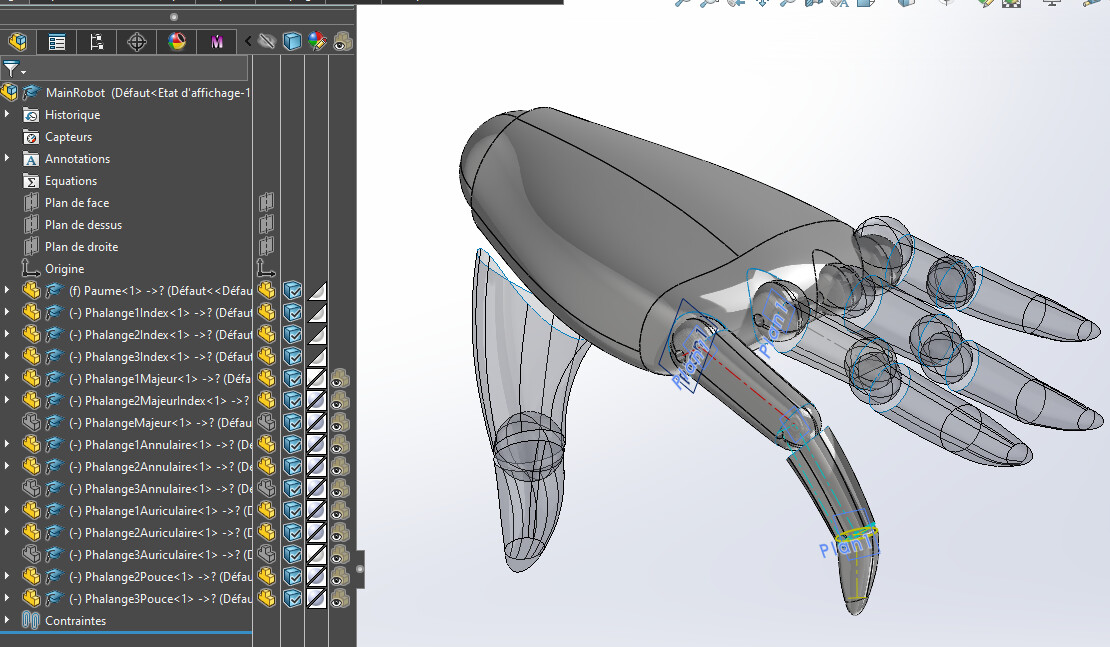
Dank u voor uw antwoord. Ik isoleerde alle componenten van het model die ik op GrabCAD vond om een assemblage te maken. Dan voeg ik beperkingen toe om ze te laten bewegen. Helaas staat mijn leraar erop dat ik dit model gebruik, dus ik heb niet echt een keus . Dan simuleer ik elke beweging, zoals het sluiten van mijn vingers om een vuist te vormen of het openen om een vlakke hand te krijgen. Is dit volgens u haalbaar op SolidWorks?
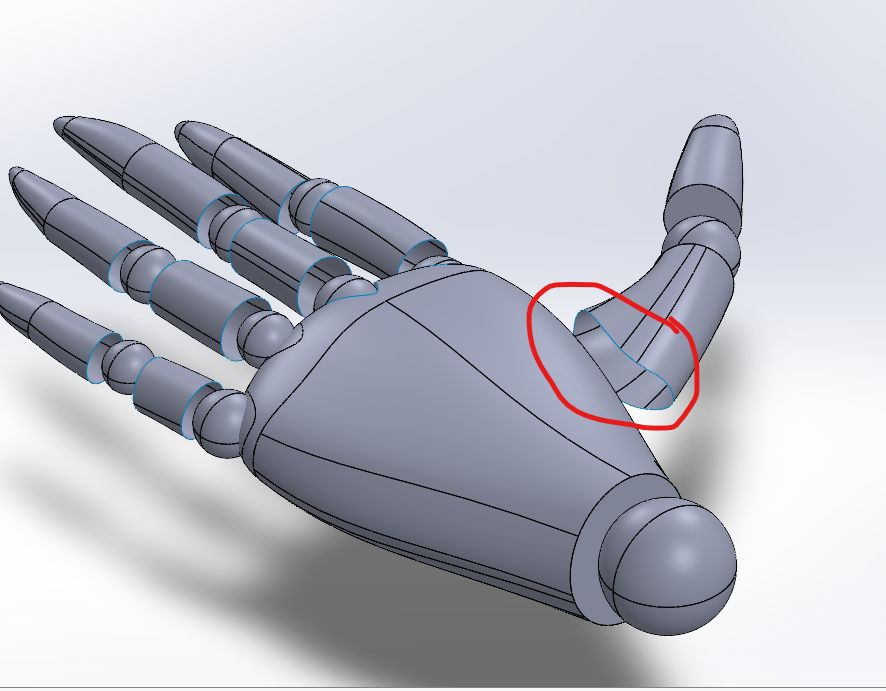
Om te illustreren wat ik zeg, volgen hier enkele afbeeldingen. Naar mijn mening zouden het ter hoogte van de vingers cilindrische draaipunten zijn, dus beperkingen van het samenvallen van de assen. Voor de duim weet ik echter, zoals je op de afbeeldingen kunt zien, niet echt wat ik als beperkingen moet stellen. Kunt u mij helpen?
Complexe oppervlaktelichamen en een paar volumelichamen (bollen) van willekeurige afmetingen en posities: een heel gedoe om te bouwen! Je hebt geen van de " vaste " geometrische referenties, zoals punten, assen, cilinders, vlakken, enz. die worden gebruikt om beperkingen van coaxialiteit of samenvallen van vlakken te creëren die essentieel zijn voor de definitie van de relatieve bewegingen tussen de handpalm en de vingerkootjes van de vingers. Voeg daarbij de nodige beheersing van een kinematicamodule (welke?) om de 15 bewegingen te besturen, en je bent klaar voor een paar uur werk. Ik heb een oplossing geschetst die beperkt is tot de drie schakels van de index. Niet een heel aantrekkelijk resultaat, maar wel eentje die je op weg kan helpen...
 Vriendelijke groeten.
Vriendelijke groeten.