W ramach projektu modelowania 3D i analizy kinematycznej dłoni (załączony model, który znalazłem na GrabCAD), zastanawiałem się, jakie byłyby najlepsze ograniczenia do zastosowania dla stawów, ponieważ muszę je później wprawić w ruch.
Dziękuję za odpowiedź! Rozważałem również dodanie ograniczeń współosiowości dla palców, ale wydaje się, że nie działa to między kulą a palcem. Czy uważasz, że to powinno działać, czy to ja używam go źle?
Nie wiem, jakie są Wasze oczekiwania w zakresie symulacji kinematycznej, ale wybrany przez Was model wydaje mi się nieprzystosowany do tego zastosowania:
Jest to utwór o wielu bryłach, którego format nie nadaje się do studium ruchu. Bardziej odpowiednie byłoby zgromadzenie;
Bryły są mieszaniną objętości (sfer?) i skomplikowanych powierzchni, trudnych do wykorzystania do zdefiniowania konkretnych wiązań, punktów i osi połączeń...
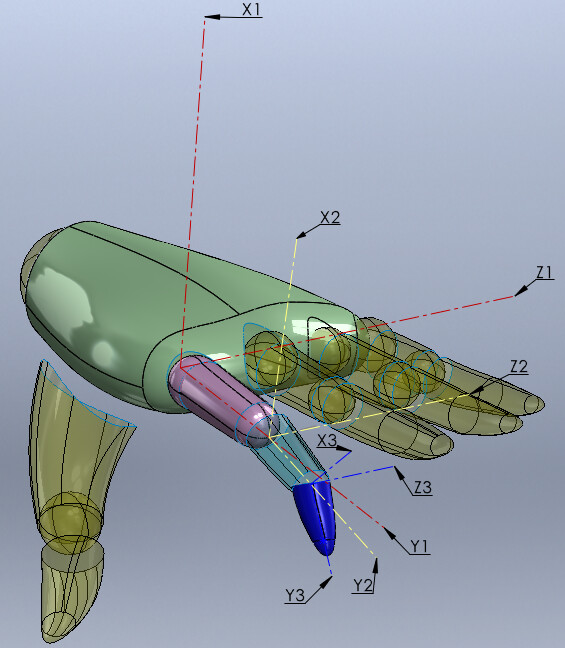
Jeśli chodzi o stopnie swobody, klasyczny model opiera się na 4 DDL dla każdego palca:
obrót pierwszego paliczka w stosunku do dłoni wokół osi X1 (" odwodzenie-przywodzenie ");
trzy obroty paliczków wokół Z1, Z2 i Z3 kolejno, które składają się na ruch " zgięciowo-prostny " palca. Trzy obroty wokół X1, Z1 i Z2 możemy uznać za niezależne, ostatni wokół Z3 jest związany z dwoma poprzednimi...
Ponieważ 5 palców jest podobnych, model ma w sumie 20 stopni swobody. Trudne sterowanie za pomocą narzędzi symulacyjnych, jeśli chcesz zasymulować sekwencję fortepianu... Łatwiej rozważyć, czy jest to po prostu kwestia zamykania i otwierania pięści. Pozdrowienia.
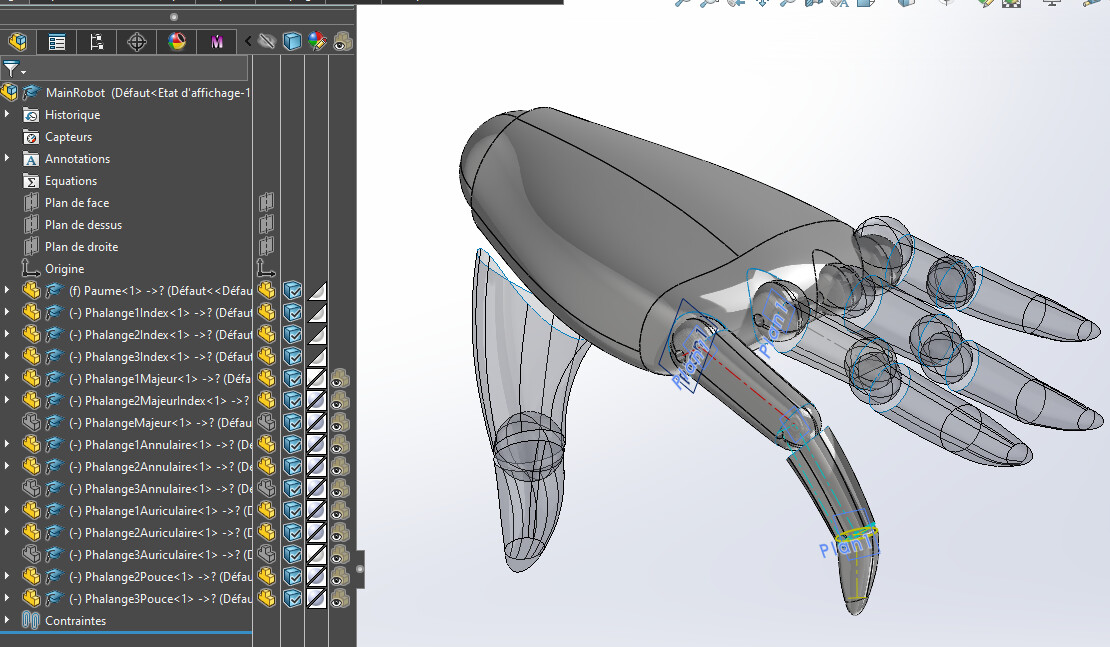
Dziękuję za odpowiedź. Odizolowałem wszystkie komponenty modelu, które znalazłem w GrabCAD, aby stworzyć złożenie. Następnie dodam ograniczenia, aby się poruszały. Niestety, mój nauczyciel nalega, żebym używał tego modelu, więc tak naprawdę nie mam wyboru . Następnie symuluję każdy ruch, taki jak zamykanie palców, aby uformować pięść lub otwieranie, aby uzyskać płaską dłoń. Czy Twoim zdaniem jest to wykonalne w SolidWorks?
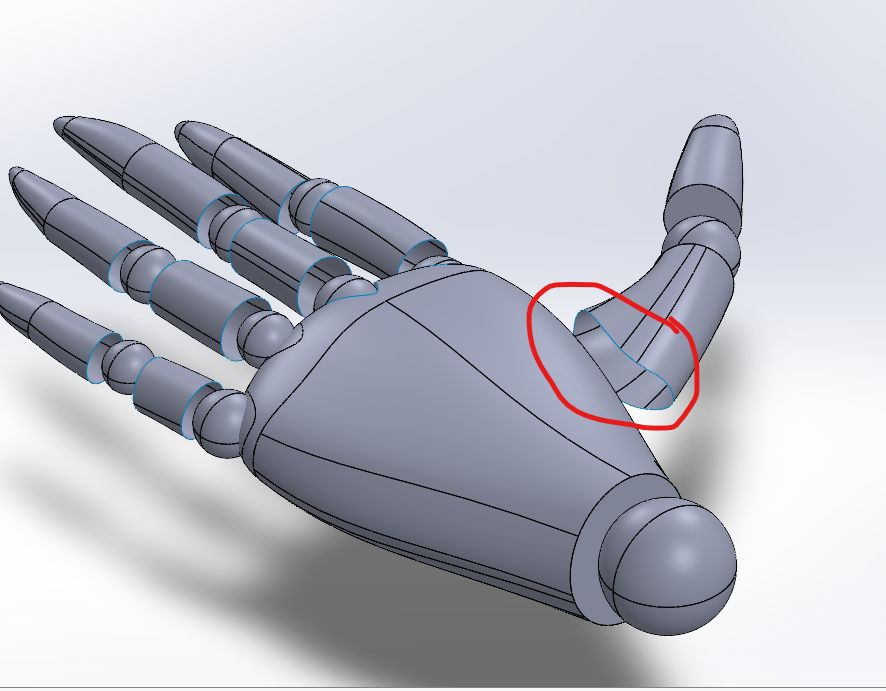
Aby zilustrować to, co mówię, oto kilka obrazów. Moim zdaniem, na poziomie palców byłyby to czopy cylindryczne, a więc ograniczenia zbieżności osi. Jednak w przypadku kciuka, jak widać na zdjęciach, tak naprawdę nie wiem, co umieścić jako ograniczenia. Czy mógłbyś mi pomóc?
Skomplikowane bryły powierzchniowe i kilka brył objętościowych (sfer) o losowych wymiarach i położeniach: prawdziwy kłopot do zbudowania! Nie masz żadnych " bryłowych " odniesień geometrycznych, takich jak punkty, osie, walce, płaszczyzny itp. które są używane do tworzenia ograniczeń współosiowości lub zbieżności płaszczyzn niezbędnych do określenia względnych ruchów między dłonią a paliczkami palców. Dodaj do tego niezbędne opanowanie modułu kinematycznego (którego?) do sterowania 15 ruchami i zaczynasz pracować przez kilka godzin. Naszkicowałem rozwiązanie ograniczone do trzech linków indeksu. Nie jest to zbyt atrakcyjny wynik, ale taki, który może pomóc Ci zacząć...
 Pozdrowienia.
Pozdrowienia.