Tag zusammen Ich stehe vor einem Problem, das ich für komplex halte und zähle auf Ihre genialen Ideen, um mir dabei zu helfen.
Ich habe es mit einem sechseckigen und geradlinigen Objekt zu tun, 10 cm hoch, wobei das Sechseck in einem beschrifteten Kreis von 1,5 cm eingraviert ist. Ich platziere mein Objekt in einem Abdruck, der es mir ermöglicht, es zu vermitteln (industrielle Nutzung). Das Objekt "fällt" auf den Boden des Fußabdrucks bis zu einer Tiefe von 2 cm. Hier sind die Einschränkungen, die ich respektieren muss:
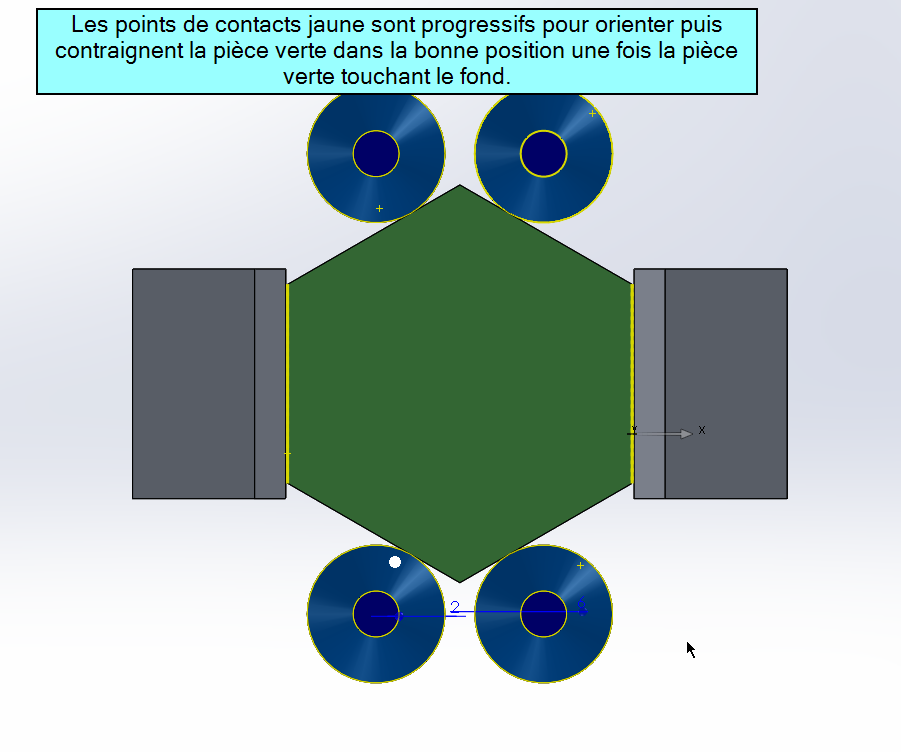
Zwischen dem Beginn seines Falls und dem Ende seines Sturzes in den Fußabdruck muss sich das Sechseck um 120 Grad ausrichten (2 Flächen).
Am unteren Rand des Einzugs muss das Objekt eingeschränkt werden, um eine Drehung zu vermeiden.
Ich muss in der Lage sein, das Objekt aus dem Abdruck zu nehmen, während ich die endgültige Ausrichtung beibehalte und es vertikal anhebe.
Wenn möglich, möchte ich, dass der Abdruck fixiert wird, das heißt, dass ich eine Konzeption des Abdrucks vermeiden möchte, die auf einer Bewegung, in Rotation dieses Abdrucks, basiert. Es ist das Objekt, das sich darin drehen muss.
Hier ist also meine Frage: Ist es möglich, sich ein Design vorzustellen, das all diesen Einschränkungen gerecht wird? Wenn ja, haben Sie ein Bild, das es mir ermöglicht, mir vorzustellen, welche Form ich geben muss?
Bisher zeigen mir alle vorgestellten Vorstellungen, dass dies so wäre, als würde man den Kreis um das Sechseck ziehen, wodurch ich alle oben erwähnten Einschränkungen verlieren würde.
Ich hoffe, ich habe mein Problem klar dargelegt. Zögern Sie nicht, wenn Sie Fragen haben und ich danke Ihnen sehr für Ihre Hilfe.
Zunächst einmal herzlich willkommen in unserem wunderbaren Forum voller kompetenter und netter Menschen.
Könnten Sie einige Punkte klarstellen?
Ich formuliere um: Sie möchten ein sechseckiges Objekt mit einer Höhe von 120 mm auf einem Förderband bewegen. Dieses Objekt wird nach einem Sturz (aus einer Rutsche, nehme ich an) auf einen Teppich in Empfang genommen. Das sechseckige Objekt bewegt sich in aufrechter Position auf der Matte.
Wenn ich das richtig verstehe, ist Ihr Problem einfach zu lösen. 1°) eine zylindrische zylindrische Rutsche, die das Teil vorpositioniert, bevor es auf dem Band ankommt 2°) gerade Führungen, die ein Verdrehen verhindern und somit die Vorpositionierung von der speziellen Rutsche aus verändern.
3°) Sagen Sie uns auf der anderen Seite, wie Sie das Objekt von unten nach oben aus dem Abdruck herausbekommen oder durch Fallen in die richtige Position für den nächsten Schritt bringen möchten. Erzählen Sie uns ein Minimum darüber, was im nächsten Schritt passiert, beim Laden in eine andere Maschine usw. 4°) Sagen Sie uns, warum Sie das Sechskantstück angesichts des eher kleinen Querschnitts von 1,5 x 200 mm vertikal transportieren möchten.
Wenn ich es richtig verstanden habe, ist der PB mit wenigen Teilen und ohne automatische Vorpositionierung einfach zu lösen. Die Landattraktion ist kostenlos.
Hallo @Zozo_mp , Vielen Dank für die Reaktionsfähigkeit!
Ich dachte nicht, dass Sie mehr Kontext brauchen, aber hier ist es: Das Ziel ist es, mein sechseckiges Objekt auf einer Montagemaschine von Station zu Station zu bewegen. An Station 1 platziere ich mein Objekt in einer Art Shuttle (wir nennen es Förderkübel) vertikal. Auf Station 2 schließe ich den Zusammenbau dieses Objekts ab und auf Station 3 komme ich, um das Objekt aus seinem Shuttle/Eimer zu nehmen. Für die Montagevorgänge an Station 2 muss ich mein Objekt vertikal vorschieben. An Station 3 greife ich das Objekt an seinem oberen Teil und ziehe es dann mit einer vertikalen Bewegung heraus.
Es geht also darum, eine Lösung für die Form zu finden, die ich dem Abdruck in meinem Schiffchen/meiner Förderschaufel gebe, dem Abdruck, der das Objekt aufnimmt.
Und alles passiert meiner Meinung nach an Station 1, wenn ich komme, um mein Objekt im Shuttle abzulegen. Ich komme, um es "freizulassen", wenn es in der Grundfläche des Shuttles eingerastet ist. Die Schwerkraft erledigt den Rest.
Erscheint Ihnen das klarer?
Zögern Sie nicht, wenn Sie noch mehr Details benötigen. Ich sammle Fotos und hänge sie bis heute Abend an euch an, um meine Worte zu veranschaulichen.
Befindet sich die Förderschaufel auf einem Gurt- oder Kettensystem, wie es oft der Fall ist?
Dadurch wird das Objekt in die Förderschaufel gelegt. Fällt es durch die Schwerkraft in den Eimer? Fällt es aus einem Trichter, in den die sechseckigen Profile in loser Schüttung gelegt werden? Wenn ja, werden sie horizontal oder vertikal platziert. Mit anderen Worten, ist es ein Mechanismus, der den Sturz auslöst (die Schaufel beim vertikalen Passieren, oder ist es die Hand eines Bedieners, der die sechseckige Stange loslässt?
Die Schaufeln bewegen sich auf Förderbändern. Die Agrar- oder Kosmetikindustrie verwendet offensichtlich viel davon. Das ist ein gutes Beispiel. In dem Beispiel, das ich Ihnen zeigen möchte, sind die weißen Körbchen genau so, wie ich sie verwende. Da Sie Schwierigkeiten beim Hochladen von Fotos haben, lade ich Sie ein, zum Beispiel dem folgenden Link zu folgen:
Die Objekte werden einzeln mit Hilfe von Greifern platziert, die am Ende der Roboter angebracht sind. Mein Objekt wird also immer nach der gleichen "Ausrichtung" abgelegt. Durch den Prozess präsentiert sich mein Objekt in der gleichen Position in den Klemmen. Dann positioniert sich die Zange über den Bechern, senkt sich, um den Gegenstand einen Zentimeter in die Becher einzuführen, dann öffnen sie sich. Das Objekt fällt dann auf den Boden seines Hohlraums, in den Eimer. Es ist im Moment dieses Sturzes, dass ich mein Objekt neu ausrichten möchte.
Da ist etwas unklar! Können Sie das näher erläutern?
und weiter sagst du
Das impliziert also, dass der Robotergreifer das Sechseck bereits nahezu perfekt platziert, so dass das Sechseck in den Becher fallen kann. Dann sagst du, dass der Gegenstand 2 cm in die Tiefe fällt oder er in der Schaufel stecken bleibt.
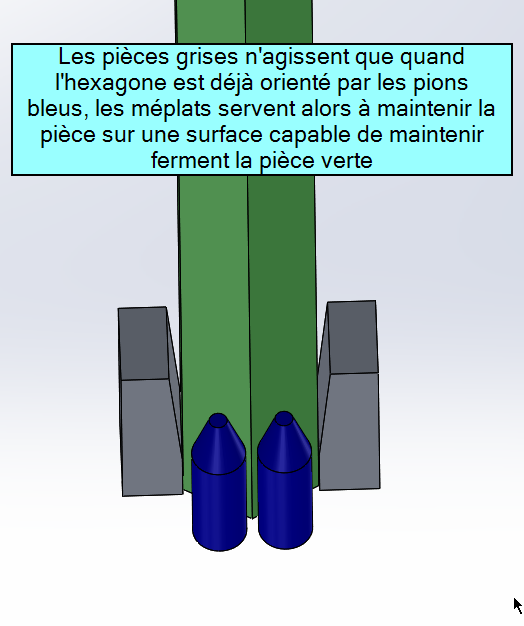
Das bedeutet, dass die Führung im Inneren der Schaufel nur 1 cm zur Positionierung verwendet wird. Wenn Sie möchten, dass Ihre Sechskantstange nicht ins Wanken gerät, darf die Grundfläche praktisch kein Spiel haben. 1 Satz 2/10 ergibt eine Verschiebung von mehreren mm am oberen Ende des Sechskants. Ebenso ist diese Instabilität aufgrund des Spiels mit einem Objekt von 120 mm Höhe kompatibel. Wir sollten sehen, ob der Roboter etwas weniger nach unten gehen kann, wenn er das Sechseck richtig in den Klauen platziert hat, oder ob es derjenige ist, der nach unten drückt. In diesem Fall muss der Greifer flexibel sein, wie z. B. Schaumstoff oder Klemme mit Minifedern.
Eine andere, einfachere Lösung, wenn sie mit den folgenden Operationen an den Stationen 2 und 3 kompatibel ist, wäre, dass der Hohlraum in der Schaufel nicht 2 cm, sondern beispielsweise 5 oder 10 mm beträgt. Dies würde eine Menge BP lösen.
Hilfsfrage , wie hoch das Gewicht (oder das Material Ihrer sechseckigen Stange) ist. Wenn es Plastik ist, ist es! weil das Gewicht nicht ausreicht, um eine minimale Unterstützung zu gewährleisten.
Während Sie auf Ihre Antworten auf die gestellten Fragen warten, finden Sie bitte meinen Vorschlag, um sich entsprechend Ihren Antworten zu verbessern, insbesondere in Bezug auf das Gewicht des Teils und die möglichen Möglichkeiten mit dem Robotergreifer.
Ich persönlich denke, es wäre besser, wenn der Roboter die Münze ganz nach unten schieben würde. Dies impliziert ein kleines rotierendes Spiel des Greifers des Roboters. (wird noch besprochen)
Wenn ich die ursprüngliche Frage noch einmal lese, glaube ich, dass der entscheidende Punkt und daher die berichtete Schwierigkeit folgendermaßen ist:
Zwischen dem Beginn seines Falls und dem Ende seines Sturzes in den Fußabdruck muss sich das Sechseck um 120 Grad ausrichten (2 Flächen).
Ich denke, dass die Stange vertikal angeordnet ist und dass die erwartete Bewegung eine spiralförmige Bewegung ist: Drehung um 120 Grad während der Verschiebung von 20 mm. Es ist jedoch notwendig, den durch die Klemme verursachten Eingriff der Stange in die Schaufel von 10 mm zu berücksichtigen. Also eigentlich 10mm in einer geraden Linie, dann 120 Grad für die restlichen 10mm Federweg, was eine Propellersteigung von 30mm ergibt.
Wenn dies die Bewegung ist, die erwartet wird, könnte eine spiralförmige Rampe geeignet sein... Aber ich sehe keine Lösung, wenn es nur die Kanten und Flächen der Stange gibt, um die Führung entlang der Rampe einzuschränken...
Hallo @Zozo_mp , Vielen Dank für Ihre Arbeit und Recherche, es ist sehr schön, sich Zeit zu nehmen.
Um es in die richtige Perspektive zu rücken, habe ich Ihnen gesagt, dass die Münze einen Zentimeter gesunken ist, bevor sie freigegeben wurde. Sie sollten eher 7mm in Betracht ziehen. Dann habe ich Ihnen gesagt, dass der Fußabdruck 2 cm tief war, aber es ist der Fall, der 2 cm beträgt, d.h. ein tiefer Fußabdruck von 2,7 cm.
In Bezug auf die Bewegungen in Ihrem Video sind dies die richtigen. Auf der anderen Seite, wie du in deiner letzten Botschaft richtig sagst: Ich muss mein Zimmer in diesem Herbst um 120 Grad ausrichten. Eine spiralförmige Form könnte vielleicht funktionieren. Bisher ist mir das nicht gelungen, da die Kanten des sechseckigen Objekts das Vordringen des Objekts in den hinteren Teil des Raumes behindern. Und abgesehen von den Kanten und flachen Flächen des Sechsecks kann mir nichts anderes helfen, das Objekt zu manipulieren.
Für ein bisschen mehr Details, mein Teil besteht aus Kunststoff und Aluminium und wiegt ca. 60g würde ich sagen.
Sie sagten, geradlinig aus Ich sehe plötzlich insbesondere in der Nachricht von @m_blt (der auch von Rampe spricht, während das Teil vom Robotergreifer gebracht wird) und dann mit Ihnen über die spiralförmige Bewegung sprechen.
Jetzt haben Sie gut geschrieben
Wenn der Greifer Ihres Roboters das Teil korrekt über der Aufnahme positioniert, beträgt der Einstellwinkel normalerweise weniger als fünf Grad im Uhrzeigersinn oder gegen den Uhrzeigersinn. Deshalb setze ich Zähler mit einer Fase und einer Arretierung erst in den letzten mm in die richtige Position. Ich verstehe es überhaupt nicht
Zwischen Sekunde 09 und Sekunde 59 Ihres Videos muss sich das Objekt um 2 Seiten drehen, und das ist mein Problem. Es tut mir leid, wenn es mir an Klarheit mangelt, es ist nicht einfach, das klar zu machen
Im Video dreht sich das Teil nicht, weil es sich durch den Greifer des Roboters fast in der richtigen Position befindet. Die Spielfiguren werden nur zum leichten Nachjustieren verwendet, falls die Klemme das Stück nicht ganz so darstellt, wie es sollte. Die Umdrehung der Neuausrichtung kann nur 1 bis 2° betragen, im schlimmsten Fall stündlich oder gegen den Uhrzeigersinn.
Stimmen Sie zu, dass sich das Objekt, sobald es sich in der unteren Position befindet, nicht mehr in der Rotation bewegen kann?
PS: Ein Holzstift wiegt 5 g, also stelle ich eine andere Frage als die Geschwindigkeit der Übersetzung des Bechers zwischen Schritt 1 - 2 und 3. Ich sage das, weil dein Gegenstand nicht an Ort und Stelle bleibt, wenn er nicht fest genug in der Tasse festgezogen ist.
In einer Sondermaschine ist es oft einfacher / zuverlässiger, alle Bewegungen zu zerlegen. Persönlich würde ich die Schaufel nur in Position 1 halten, ich würde dann die Schaufel um 120° zwischen 1 und 2 drehen (vielleicht durch einen Finger unter der Schaufel, der sich in einer Nockenbahn verfängt, um diese 120° zu machen und dann in Position zu halten, oder aber eine Form eines Zahnrads an der Außenseite der Schaufel und eine Reihe von Zähnen, die gut auf ein festes Gestell passen, das die Schaufel zwingt zu drehen...).
Andernfalls müssen Sie möglicherweise darüber nachdenken, eine Rotationsachse + Motorisierung am Greifer hinzuzufügen, um diese 120°-Bewegung zwischen dem Griff und der Entriegelung auszuführen (Roboterarme haben oft eine integrierte Rotationsachse vor ihrem Greifer).
Hallo @froussel genau, das sind sehr gute Ideen, aber ich wollte mich nicht zu sehr auf diese Art von Lösung festlegen, aus Angst vor der Präzision der Drehung
Wenn die Drehung am Arm durchgeführt wird, sollten einfache Eingangsfasen ausreichen, um die Ausrichtung des Teils zu finalisieren (wenn man bedenkt, dass der Arm innerhalb von einem oder 2 Grad etwas nachgibt: Zeichnen Sie einfach das Teil um diese 1 oder 2° versetzt neu, um zu sehen, welche Fasen Sie an Ihrer Schaufel anbringen müssen)
Ich bevorzuge die erste Lösung mit dem Finger unter dem Becher (oder einen einfachen Stab, der sich trifft, und eine feste Lasche, die den Becher um 120° dreht. Das einzige Problem ist, dass sich die Schaufel nicht dreht, sobald sie das Gestell passiert hat. Das bedeutet, dass Sie eine flache Stelle mit der Abmessung der Unterseite des Zahnrads haben, damit es sich nicht dreht (oder eine andere intelligente Lösung, deren Geheimnis Sie kennen). Natürlich ist die zweite Lösung flexibler und zuverlässiger, wenn Sie einen Motor mit einer Schneckenschraube haben. Das einzige Problem ist, dass wenn das Transferband für die Stromversorgung 10 Meter lang ist, es nicht einfach ist, vor allem mit dem Rücklauf unter der Förderkette.
Die Drehsperre für die 120°-Nachdrehphase kann z. B. über eine Rutsche erfolgen, die über dem Getriebe-/Zahnstangenbereich platziert ist (der sich sogar unter der Schaufel befinden kann).