Hi everyone I am faced with a problem that I consider complex and I am counting on your ingenious ideas to help me.
I have to handle a hexagonal and rectilinear object, 10cm high, the hexagon being inscribed in an inscribed circle of 1.5cm. I place my object in an imprint allowing me to convey it (industrial use). The object "falls" to the bottom of the footprint to a depth of 2cm. Here are the constraints that I must respect:
Between the beginning of its fall and the end of its fall into the footprint, the hexagon must orient itself by 120 degrees (2 faces).
Once at the bottom of the indentation, the object must be constrained to avoid any rotation.
I have to be able to take the object out of the imprint while maintaining the final orientation, lifting it vertically.
If possible, I want the imprint to be fixed, that is to say that I want to avoid a conception of the imprint that is based on a movement, in rotation of this imprint. It is the object that must rotate in it.
So here is my question: Is it possible to imagine a design that meets all these constraints? If so, do you have an image that allows me to imagine the shape I have to give?
So far, all the conceptions imagined show me that this would be like drawing the circle around the hexagon, making me lose all the constraints I mentioned above.
I hope I have been clear in the exposition of my problem. Do not hesitate if you have any questions and I thank you very much for your help.
First of all, welcome to our wonderful forum full of competent and nice people.
Could you clarify some points
I reformulate: you want to move a hexagonal object with a height of 120 mm on a conveyor. This object will be received after a fall (coming from a chute I suppose) on a carpet. The hexagonal object moves in an upright position on the mat.
If I understand correctly, your problem is simple to solve. 1°) a cylindrical cylindrical chute that prepositions the part before it arrives on the belt 2°) straight guides that prevent rotation and therefore change the pre-positioning from the special chute.
3°) On the other hand, tell us how you want to get the object out of the imprint from bottom to top or by fall in the right position for the next step. tell us a minimum about what happens in the next step, loading into another machine, etc... 4°) Tell us why you want to transport the hexagonal piece vertically given the rather small section 1.5 x 200 mm.
If I understood correctly, the PB is simple to solve with few parts and no automatic pre-positioning. The land attraction is free.
Hello @Zozo_mp , Thank you for the responsiveness!
I didn't think you needed more context, but here it is: the goal is to advance my hexagonal object from station to station on an assembly machine. At station 1, I place my object in a kind of shuttle (we call it a conveyor bucket) vertically. On station 2 I complete the assembly of this object and on station 3 I come to take the object out of its shuttle/bucket. I have to advance my object vertically for the assembly operations at station 2. At station 3, I grab the object by its upper part and then extract it with a vertical movement.
It is therefore a question of finding a solution on the shape I give to the imprint present in my shuttle/my conveyor bucket, the imprint that accommodates the object.
And everything happens in my opinion at station 1, when I come to deposit my object in the shuttle. I come to "release" it when it is engaged in the footprint of the shuttle. Gravity does the rest.
Does this seem clearer to you?
Don't hesitate if you need even more details. I am collecting photos and attaching them to you by this evening in order to illustrate my words.
Is the conveyor bucket on a belt or chain system as is often the case?
Which places the object in the conveyor bucket. Does it fall by gravity into the bucket. Does it fall from a hopper in which the hexagonal profiles are put in bulk. If so, are they placed horizontally or vertically. In other words, is it a mechanism that triggers the fall (the bucket when passing vertically, or is it the hand of an operator that lets go of the hexagonal bar?
The buckets move on conveyor belts. The agro or cosmetic industry obviously uses a lot of it. This is a good example. In the example I want to show you, the white cups are just like what I use. Having difficulty uploading photos, I invite you to follow the following link for example:
The objects are placed individually using grippers placed at the end of robots. So my object is deposited according to the same "orientation", always. The process makes my object present itself in the same position in the clamps. Then the pliers position themselves above the cups, lower so as to insert the object one centimetre into the cups, then they open. The object then falls to the bottom of its cavity, into the bucket. It is at the moment of this fall that I want to reorient my object.
So this implies that the robot gripper already places the hexagon almost perfectly so that the hexagon can fall into the cup. Then you say that the object falls 2 cm or it gets stuck in position in the bucket.
This means that the guide inside the bucket is only used for 1 cm for positioning. If you want your hex bar not to falter, the footprint must have virtually no play. 1 set of 2/10th will make a displacement of several mm at the top of the hexagonal bar. So is this instability due to the game compatible with an object of 120 mm high. We should see if the robot can go down a little less if it the hexagon is correctly placed in the claws, or if it is the one that pushes down. In this case, the gripper must be flexible, like foam or clamp with mini springs.
Another simpler solution, if it is compatible with the following operations on stations 2 and 3, would be that the cavity in the bucket is not 2cm but for example 5 or 10 mm. This would solve a lot of bp.
Subsidiary question what is the weight (or material of your hexagonal bar). If it's plastic, it sucks! because the weight will be insufficient to ensure a minimum support.
While waiting for your answers to the questions asked, please find my proposal to improve according to your answers, especially on the weight of the part and the possible possibilities with the robot gripper.
Personally, I think it would be better for the robot to push the coin all the way to the bottom. This implies a little rotating play of the robot's gripper. (to be discussed)
Rereading the initial question, I believe that the key point, and therefore the difficulty reported, is this:
Between the beginning of its fall and the end of its fall into the footprint, the hexagon must orient itself by 120 degrees (2 faces).
I think that the bar is arranged vertically and that the expected movement is a helical movement: rotation of 120 degrees during the translation of 20 mm. However, it is necessary to take into account the 10 mm engagement of the bar in the bucket caused by the clamp. So actually 10mm in a straight line, then 120 degrees for the remaining 10mm of travel, which makes a propeller pitch of 30mm.
If this is the movement that is expected, a helical ramp could be suitable... But I don't see a solution if there are only the edges and faces of the bar to constrain the guidance along the ramp...
Hello @Zozo_mp , Thank you for your work and research, it's very nice to take your time.
Indeed, to put it in perspective, I told you that the coin went down a centimeter before being released. You should rather consider 7mm. Then I told you that the footprint was 2cm deep, but it is the fall that is 2cm, i.e. a deep footprint of 2.7cm.
Regarding the movements on your video, these are the right ones. On the other hand, as you rightly say in your last message: I have to orient my room 120 degrees during this fall. A helical shape could perhaps work. So far, I haven't succeeded, as the edges of the hexagonal object hinder the object's progress to the back of the room. And apart from the edges and flat areas of the hexagon, nothing else can help me manipulate the object.
For a little more detail, my part is made of plastic and aluminum and weighs about 60g I would say.
You said rectilinear out of I suddenly see appear in particular in the message of @m_blt (who also talks about ramp while the part is brought by the robot gripper) and then talk to you about helical movement.
Now you have written well
If your robot's gripper correctly positions the part above the receptacle, the angle of adjustment will normally be less than five degrees clockwise or counterclockwise. That's why I put counters with a chamfer and a lock in the right position only in the last few mm. I don't understand at all
Between second 09 and second 59 of your video, the object must rotate on 2 sides, and that's my problem. I'm sorry if I'm lacking clarity, it's not easy to make clear
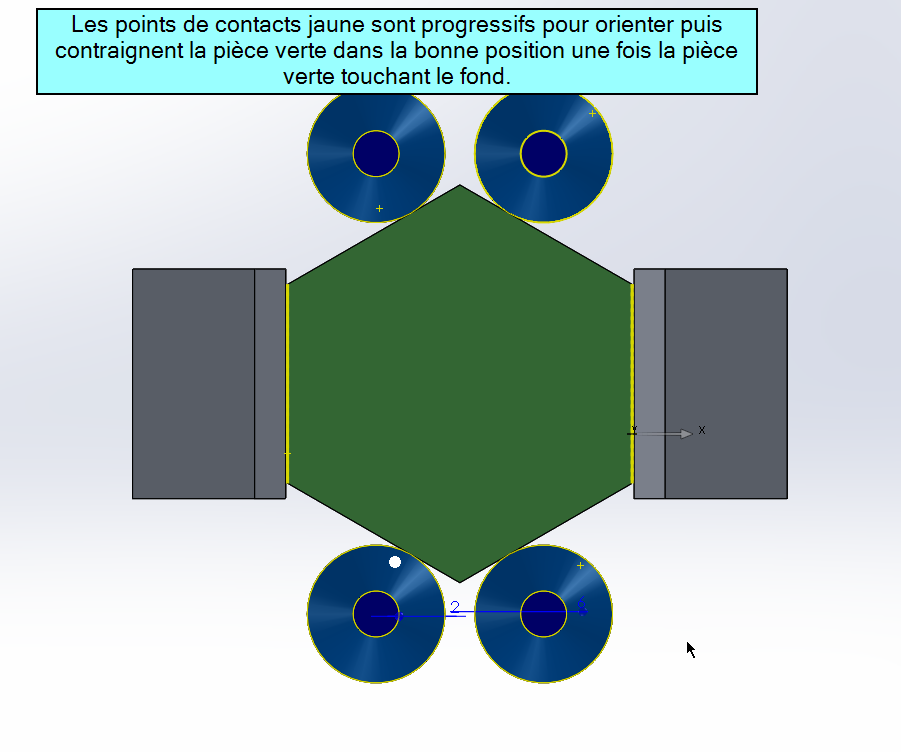
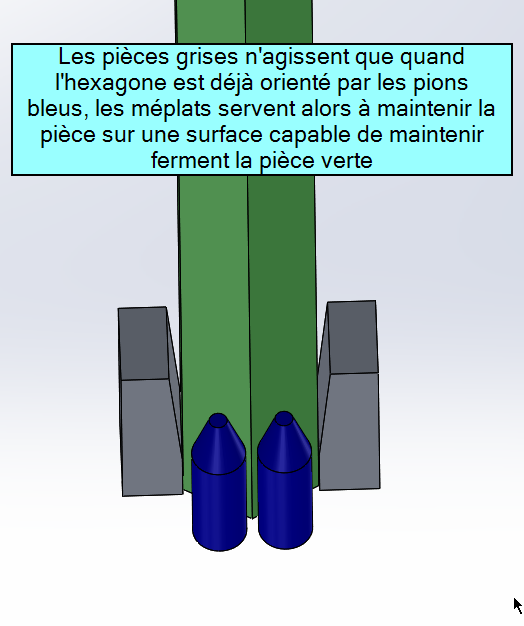
In the video, the part does not rotate because it is almost in the right position by the robot's gripper. The pawns are only used to realign slightly in case the clamp does not quite present the piece as it should. The realignment rotation can only be 1 to 2° in the worst case in hourly or counterclockwise.
Do you agree that once the object is in the down position it can no longer move in rotation.
PS: A wooden pencil is 5 gr so I ask another question than the speed of translation of the cup between step 1 - 2 and 3. I say this because your object will not stay in place if it is not tightened enough in the cup.
In a special machine it is often simpler / more reliable to break down all the movements. Personally I would only keep the chute in position 1, I would then rotate the bucket 120° between 1 and 2 (maybe by a finger under the bucket that gets caught in a cam track to make these 120° and then a hold in position, or else a shape of cogwheel on the outside of the bucket and a number of teeth that fits well on a fixed rack that forces the bucket to turn...).
Otherwise you might have to think about adding a rotation axis + motorization on the gripper to make this 120° movement between the grip and the release (robotic arms often have an integrated rotation axis before their gripper).
Hello @froussel, exactly, these are very good ideas but I didn't want to commit too much to this kind of solution, for fear of the precision of the rotation
If the rotation is done on the arm, simple entrance chamfers should be enough to finalize the orientation of the part (considering that the arm gives something to within one or 2 degrees: just redraw the part offset by these 1 or 2 ° to see which chamfers you need to put on your bucket)
I prefer your first solution with the finger under the cup (or a simple rod that meets and a fixed lug which rotates the cup 120°. The only thing is that once the bucket has passed the rack it doesn't make the bucket rotate. Which implies having a flat spot with the dimension of the bottom of the gear so that it doesn't turn (or other smart solution of which you have the secret ) Obviously the second solution is more flexible and more reliable if you have a motor with a worm screw. The only problem is that if the transfer belt is 10 meters long for the electric power supply it's not easy especially with the return under the conveyor chain.
The rotating lock for the 120° post-rotation phase can be done via flat/slide placed above the gear/rack area for example (which could even be under the bucket).