Bonjour tout le monde,
Je suis face a un problème que je juge complexe et je compte sur vos idées ingénieuses pour m’aider.
Je dois manipuler un objet hexagonale et rectiligne, de 10cm de haut, l’hexagone étant inscrit dans un cercle inscrit de 1,5cm. Je dépose mon objet dans une empreinte me permettant de le convoyer (usage industrielle). L’objet « chute » au fond de l’empreinte sur une profondeur de 2cm.
Voici maintenant les contraintes que je dois respecter :
entre le début de sa chute, et la fin de sa chute dans l’empreinte, l’hexagone doit s’orienter de 120 degrés (2 faces).
une fois au fond de l’empreinte, l’objet doit être contraint pour éviter toute rotation.
je dois être capable de sortir l’objet de l’empreinte en conservant l’orientation finale, en le soulevant verticalement.
si possible, je souhaite que l’emprunte soit fixe, c’est à dire que je souhaite éviter une conception de l’empreinte qui s’appuie sur une mise en mouvement, en rotation de cette empreinte. C’est l’objet qui doit tourner dans celle ci.
Voici donc ma question :
Est-il possible d’imaginer une conception permettant de répondre à toutes ces contraintes ? Si oui, auriez vous une image me permettant de me représenter la forme que je dois donner ?
Jusqu’ici, toutes les conceptions imaginées me montrent que cela reviendrait à tracer le cercle autour de l’hexagone, me faisant perdre toutes les contraintes que je cite plus haut.
J’espère avoir été clair dans l’exposition de mon problème.
N’hésitez pas si vous avez des questions et je vous remercie énormément pour votre aide.
Tout d’abord bienvenue sur notre merveilleux forum plein de gens compétents et sympas.
Pourrais-tu préciser certains points
Je reformule tu veux déplacer sur un convoyeur une objet de forme hexagonale d’une hauteur de 120 mm.
Cet objet sera reçu après une chute (venant d’un goulotte je suppose) sur un tapis.
L’objet hexagonal se déplace en position verticale sur le tapis.
Si j’ai bien compris votre problème est simple à résoudre.
1°) une goulotte cylindro héxagonale qui prépositionne la pièce avant qu’elle n’arrive sur le tapis
2°) des guides rectilignes qui empêchent la rotation et donc de changer le pré-positionnement issue de la goulotte spéciale.
3°) par contre dites nous pour comment vous voulez sortir l’objet de l’empreinte de bas en haut ou par chute dans la bonne position pour l’étape suivante. dites nous en un minimum sur ce qui se passe dans l’étape suivante chargement dans une autre machine etc…
4°) dites nous pourquoi vous vloulez transportez la pièce hexagonale à la verticale compte tenu de la section assez faible 1,5 x 200 mm.
Si j’ai bien compris le PB est simple à résoudre avec peu de pièces et aucun automatisme de pré-positionnement.
L’attraction terrestre est gratuite.
Je ne pensais pas qu’il vous fallait davantage de contexte mais le voici : l’objectif est de faire progresser mon objet hexagonale de poste en poste sur une machine d’assemblage. Au poste 1, je viens déposer mon objet dans une sorte de navette (nous appelons ça un godet de convoyage) à la verticale. Sur le poste 2 je viens compléter l’assemblage de cet objet et au poste 3 je viens sortir l’objet de sa navette/son godet. Je dois faire progresser mon objet à la verticale pour les opérations d’assemblage au poste 2. Au poste 3, je viens saisir l’objet par sa partie haute puis l’extraire d’un mouvement vertical.
Il s’agit donc de trouver une solution sur la forme que je donne à l’empreinte présente dans ma navette/mon godet de convoyage, l’empreinte qui accueille l’objet.
Et tout se passe selon moi au poste 1, lorsque je viens déposer mon objet dans la navette. Je viens le « lâcher » lorsqu’il est engager dans l’empreinte de la navette. La gravité faisant le reste effectivement.
Est ce que cela vous paraît plus clair ?
N’hésitez pas si vous avez besoin d’encore plus de précisions. Je recueille des photos et vous les joins d’ici ce soir afin d’imager mes propos.
Le godet de convoyage est-il sur un tapis ou un système à chaines comme souvent ?
Qui place l’objet dans le godet de convoyage. Est-ce qu’il tombe par gravité dans le godet.
Est-ce qu’il tombe d’une trémie dans laquelle sont mis en vrac les profilés hexagonaux.
Si oui sont-ils placés à l’horizontal ou la verticale.
Dis autrement est-ce un mécanisme qui déclenche la chute (le godet au passage à la verticale, ou est-ce la main d’un opérateur qui lâche la barre hexagonale.?
Les godets se déplacent sur des tapis roulant. L’industrie agro ou cosmétique en utilise beaucoup visiblement. C’est un bon exemple. Dans l’exemple que je veux vous montrer, les godets blancs sont à l’image de ce que j’utilise.
Ayant des difficultés à télécharger des photos, je vous invite à suivre le lien suivant pour exemple :
Les objets sont déposés unitairement grace à des pinces placées au bout de robots. Donc mon objet est déposé selon la même « orientation », toujours. Le process fait que mon objet se présente dans une même position dans les pinces. Puis les pinces se positionnent au dessus des godets, descendent de manière à insérer d’un centimètre l’objet dans les godets, puis elles s’ouvrent. L’objet tombe alors au fond de sa cavité, dans le godet. C’est au moment de cette chute que je souhaite réorienter mon objet.
Donc cela sous entend que la pince du robot place l’hexagone de manière déjà presque parfaite pour que l’hexagone puisse tomber dans le godet.
Puis vous dites que l’objet chute de 2 cm ou il se bloque en position dans le godet.
Cela veut dire que le guide à l’intérieur du godet ne sert que sur 1 cm pour le positionnement.
Si vous voulez que votre barre hexagonale ne bagotte pas, il faut que l’empreinte n’ait pratiquement pratiquement pas de jeu. 1 jeu de 2/10 ème fera en haut de la barre hexagonale un déplacement de plusieurs mm.
Donc cette instabilité due au jeu est-elle compatible avec un objet de 120 mm de haut.
IL faudrait voir si le robot peut descendre un peu moins s’il l’hexagone est correctement placé dans les pinces, soit que ce soit lui qui enfonce. Dans le cas il faut que la pince de préhension soit souple genre mousse ou pince avec des minis ressorts.
Autre solution plus simple si c’est compatible avec les opérations suivantes sur les postes 2 et 3 serait que l’empreinte dans le godet ne fasse pas 2cm mais par exemple 5 ou 10 mm. Cela résoudrait pas mal de pb.
Question subsidiaire quel est le poids (ou la matière de votre barre hexagonale). Si c’est du plastique, ça craint ! car le poids sera insuffisant pour assurer un maintien minimum.
En attendant vos réponses aux questions posées, veuillez trouver ma proposition à améliorer en fonction de vos réponses notamment sur le poids de la pièce et les éventuelles possibilités avec la pince du robot.
Personnellement je pense qu’il vaudrait mieux que le robot enfonce la pièce jusqu’au fond. Ce qui sous entend un petit jeu en rotation de la pince du robot. (à discuter)
En relisant la question initiale, je crois que le point clé, donc la difficulté signalée, est celui-ci :
entre le début de sa chute, et la fin de sa chute dans l’empreinte, l’hexagone doit s’orienter de 120 degrés (2 faces).
Je pense que le barreau est disposé verticalement et que le mouvement attendu est un mouvement hélicoïdal : rotation de 120 degrés au cours de la translation de 20 mm. Encore faut-il tenir compte de l’engagement de 10 mm du barreau dans le godet provoqué par la pince.
Donc en fait 10 mm en ligne droite, puis 120 degrés pour les 10 mm de course restants, ce qui fait un pas d’hélice de 30 mm.
Si c’est bien ce mouvement qui est attendu, une rampe hélicoïdale pourrait convenir…
Mais je vois mal une solution s’il n’y a que les arêtes et les faces du barreau pour contraindre le guidage le long de la rampe…
Bonjour @Zozo_mp ,
Merci pour votre travail et vos recherches, c’est très gentil de prendre de votre temps.
Effectivement, pour imager, je vous ai dit que la pièce descendait d’un centimètre avant d’être lâchée. Il faut plutôt considérer 7mm.
Ensuite je vous ai dit que l’empreinte avait une profondeur de 2cm, mais c’est la chute qui est de 2cm soit une empreinte profonde de 2,7cm.
Concernant les mouvements sur votre vidéo, ce sont les bons. En revanche, comme vous le dites très justement dans votre dernier message : je dois orienter ma pièce de 120 degrés durant cette chute. Une forme hélicoïdale pourrait peut être fonctionner. Jusqu’ici, je n’ai pas réussi, les arrêtes de l’objet hexagonal gênant la progression de l’objet jusqu’au fond de la pièce. Et mis à part les arrêtes et les aplats de l’hexagone, rien d’autre ne peut m’aider à manipuler l’objet.
Pour un peu plus de détails, ma pièce est composée de plastique et d’alu et pèse environ 60g je dirais.
Vous avez dis rectiligne hors je vois soudain apparaître notamment dans le message de @m_blt (qui parle d’ailleurs de rampe alors que la pièce est amenée par la pince du robot ) puis vous parler de mouvement hélicoïdal.
Or vous avez bien écrit
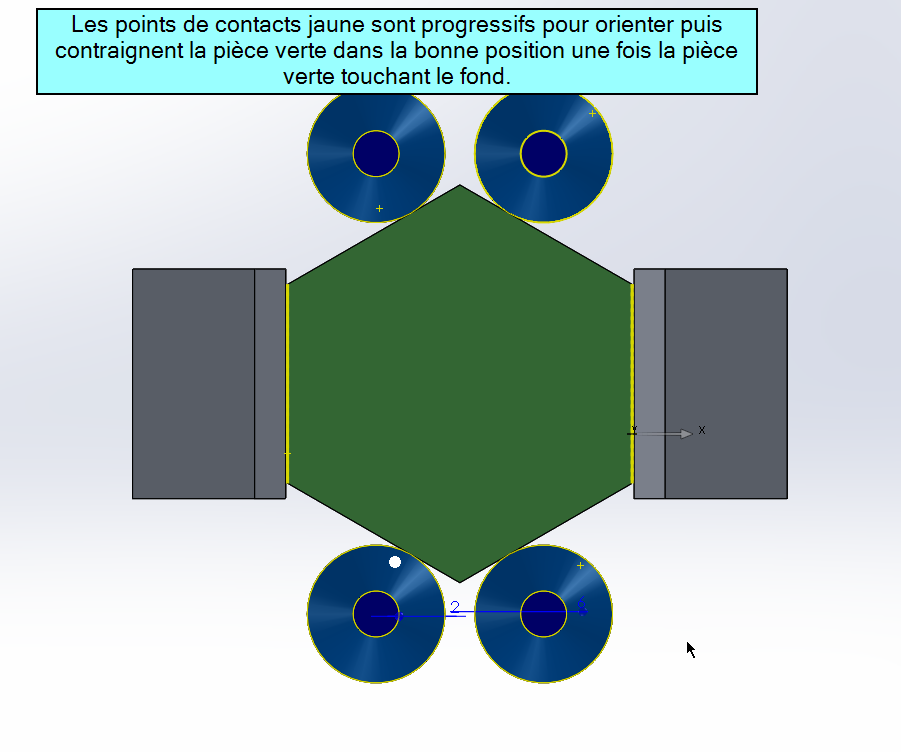
Si la pince de votre robot positionne correctement la pièce au dessus du réceptacle l’angle d’ajustement ne sera normalement de moins de cinq degrès horaire ou anti-horaire. C’est pourquoi j’ai mis des pions avec un chanfrein et un blocage dans la bonne position seulement dans les derniers mm.
Je ne comprend pas du tout
ce n’est pas ce que vous avez dis précédemment.
Cordialement
J’espère que ce n’est pas moi qui fume des neurones
Entre la seconde 09 et la seconde 59 de votre vidéo, l’objet doit tourner de 2 faces, et c’est la toute ma problématique.
Je suis désolé si je manque de clarté, ce n’est pas évident à faire comprendre
Dans la vidéo la pièce ne tourne pas car il est quasiment dans la bonne position par la pince du robot.
Les pions ne servent qu’a recaler légèrement au cas ou la pince ne présenterait pas tout à fait la pièce comme il faut. La rotation de recalage ne peut être dans le pire des cas que de 1 à 2 ° en horaire ou anti horaire.
Est-ce que vous êtes d’accord qu’un fois l’objet en position basse il ne peut plus bouger en rotation.
PS : Un crayon mine en bois c’est 5 gr donc je repose une autre question qu’elle la vitesse de translation du godet entre l’étape 1 - 2 et 3. Je dis ça parce que votre objet ne tiendra pas en place s’il n’est pas serré suffisament dans le godet.
En machine spéciale il est souvent plus simple / fiable de décomposer tous les mouvements.
Perso je ne garderait que la chute en poste 1, je ferais ensuite tourner le godet de 120° entre 1 et 2 (peut être par un doigt sous le godet qui se prend dans un chemin de came pour faire ces 120° puis un maintien en position, ou sinon une forme de roue dentée sur l’extérieur du godet et un nombre de dent qui va bien sur une crémaillère fixe qui force le godet à tourner…).
Sinon il faudrait peut être penser à rajouter un axe de rotation + motorisation sur la pince pour faire se mouvement de 120° entre la prise et la relâche (les bras robotisés on souvent un axe de rotation intégré avant leur pince).
Bonjour @froussel, exact, ce sont de très bonnes idées mais je ne voulais pas trop m’engager sur ce genre de solutions, de peur de la précision de la rotation
Si la rotation se fait sur le bras, des simples chanfreins d’entrées doivent suffire pour finaliser l’orientation de la pièce (en considérant que le bras donne quelque chose à un ou 2 degré près : il suffit de redessiner la pièce décalée de ces 1 ou 2 ° pour voir quels chanfreins il faut que tu mettes sur ton godet)
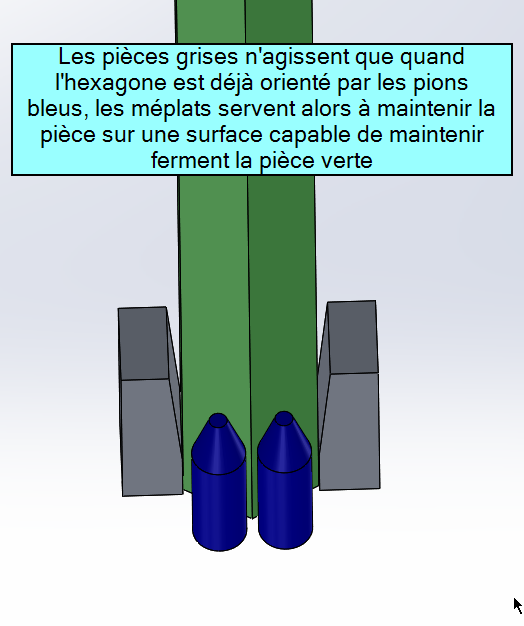
Je préfère ta première solution avec le doigt sous le godet (ou une simple tige qui rencontre et un ergot fixe ce qui fait tourner le godet de 120°. Le seul truc c’est q’une fois que le godet à dépasser la crémaillère il ne fait pas que le godet puisse tourner. Ce qui sous entend d’avoir un méplat avec la cote du fond d’engrenage pour que cela ne tourne pas ( ou autre solution intelligente dont tu as le secret )
Evidemment la deuxième solution est plus souple et plus fiable si tu as un moteur avec un vis sans fin. Le seul problème c’est que si le tapis de transfert fait 10 mètre de long pour l’alim électrique c’est pas gagné surtout avec le retour sous la chaine transporteuse.
Le blocage en rotation pour la phase post rotation de 120° peut tout à fait se faire via méplat/glissière placé au dessus de la zone engrenage/crémaillère par exemple (qui pourrait même se trouver sous le godet).