Hallo allemaal Ik word geconfronteerd met een probleem dat ik complex vind en ik reken op uw ingenieuze ideeën om mij te helpen.
Ik moet een zeshoekig en rechtlijnig object van 10 cm hoog hanteren, waarbij de zeshoek is gegraveerd in een ingeschreven cirkel van 1,5 cm. Ik plaats mijn object in een afdruk waardoor ik het kan overbrengen (industrieel gebruik). Het object "valt" naar de bodem van de voetafdruk tot een diepte van 2 cm. Dit zijn de beperkingen die ik moet respecteren:
Tussen het begin van zijn val en het einde van zijn val in de voetafdruk moet de zeshoek zich 120 graden (2 vlakken) oriënteren.
Eenmaal onderaan de inkeping moet het object worden beperkt om rotatie te voorkomen.
Ik moet in staat zijn om het object uit de afdruk te halen met behoud van de uiteindelijke oriëntatie, het verticaal op te tillen.
Als het mogelijk is, wil ik dat de afdruk wordt gefixeerd, dat wil zeggen dat ik een conceptie van de afdruk wil vermijden die gebaseerd is op een beweging, in rotatie van deze afdruk. Het is het object dat erin moet draaien.
Dus hier is mijn vraag: Is het mogelijk om een ontwerp voor te stellen dat aan al deze beperkingen voldoet? Zo ja, heb je een beeld waarmee ik me kan voorstellen welke vorm ik moet geven?
Tot nu toe laten alle denkbeelden me zien dat dit zou zijn als het tekenen van de cirkel rond de zeshoek, waardoor ik alle beperkingen die ik hierboven noemde zou verliezen.
Ik hoop dat ik duidelijk ben geweest in de uiteenzetting van mijn probleem. Aarzel niet als u vragen heeft en ik dank u hartelijk voor uw hulp.
Allereerst welkom op ons prachtige forum vol bekwame en aardige mensen.
Kunt u enkele punten verduidelijken?
Ik herformuleer: je wilt een zeshoekig object met een hoogte van 120 mm op een transportband verplaatsen. Dit object wordt ontvangen na een val (afkomstig van een stortkoker veronderstel ik) op een tapijt. Het zeshoekige object beweegt in een rechtopstaande positie op de mat.
Als ik het goed begrijp, is uw probleem eenvoudig op te lossen. 1°) een cilindrische cilindrische goot die het onderdeel voorzet voordat het op de band aankomt 2°) rechte geleiders die rotatie voorkomen en daardoor de voorpositionering van de speciale stortkoker veranderen.
3°) Aan de andere kant, vertel ons hoe u het object van onder naar boven uit de afdruk wilt krijgen of door in de juiste positie te vallen voor de volgende stap. Vertel ons minimaal over wat er gebeurt in de volgende stap, laden in een andere machine, enz... 4°) Vertel ons waarom u het zeshoekige stuk verticaal wilt vervoeren, gezien de vrij kleine doorsnede van 1,5 x 200 mm.
Als ik het goed begrepen heb, is de PB eenvoudig op te lossen met weinig onderdelen en geen automatische pre-positionering. De landattractie is gratis.
Hallo @Zozo_mp , Bedankt voor het reactievermogen!
Ik dacht niet dat je meer context nodig had, maar hier is het: het doel is om mijn zeshoekige object van station naar station te brengen op een assemblagemachine. Bij station 1 plaats ik mijn object verticaal in een soort shuttle (we noemen het een transportemmer). Op station 2 maak ik de montage van dit object af en op station 3 kom ik het object uit de shuttle/emmer halen. Ik moet mijn object verticaal vooruit schuiven voor de montagewerkzaamheden op station 2. Bij station 3 pak ik het object bij het bovenste deel vast en haal het er dan met een verticale beweging uit.
Het is dus een kwestie van een oplossing vinden voor de vorm die ik geef aan de afdruk die aanwezig is in mijn shuttle/mijn transportemmer, de afdruk die plaats biedt aan het object.
En alles gebeurt naar mijn mening op station 1, als ik mijn object in de shuttle kom deponeren. Ik kom om het te "loslaten" wanneer het bezig is met de voetafdruk van de shuttle. De zwaartekracht doet de rest.
Lijkt dit je duidelijker?
Aarzel niet als u nog meer details nodig heeft. Ik verzamel foto's en voeg ze vanavond aan u toe om mijn woorden te illustreren.
Staat de transportbak op een band of kettingsysteem zoals vaak het geval is?
Die plaatst het object in de transportemmer. Valt het door de zwaartekracht in de emmer. Valt het uit een trechter waarin de zeshoekige profielen in bulk worden gezet. Zo ja, worden ze dan horizontaal of verticaal geplaatst. Met andere woorden, is het een mechanisme dat de val veroorzaakt (de emmer bij het verticaal passeren, of is het de hand van een bediener die de zeshoekige staaf loslaat?
De bakken bewegen over transportbanden. De agro- of cosmetische industrie maakt er uiteraard veel gebruik van. Dit is een goed voorbeeld. In het voorbeeld dat ik je wil laten zien, zijn de witte kopjes precies zoals wat ik gebruik. Als u problemen ondervindt bij het uploaden van foto's, nodig ik u uit om bijvoorbeeld de volgende link te volgen:
De objecten worden afzonderlijk geplaatst met behulp van grijpers die aan het einde van robots zijn geplaatst. Mijn object wordt dus volgens dezelfde "oriëntatie" gedeponeerd, altijd. Het proces zorgt ervoor dat mijn object zich in dezelfde positie in de klemmen presenteert. Vervolgens plaatst de tang zich boven de kopjes, laat hem zakken om het voorwerp een centimeter in de kopjes te steken en dan gaat hij open. Het object valt dan naar de bodem van zijn holte, in de emmer. Het is op het moment van deze val dat ik mijn object wil heroriënteren.
Dit houdt dus in dat de robotgrijper de zeshoek al bijna perfect plaatst zodat de zeshoek in de beker kan vallen. Dan zeg je dat het voorwerp 2 cm valt of dat het vast komt te zitten in de emmer.
Dit betekent dat de geleider in de emmer slechts voor 1 cm wordt gebruikt voor het positioneren. Als u wilt dat uw zeskantige staaf niet hapert, mag de voetafdruk vrijwel geen speling hebben. 1 set van 2/10e maakt een verplaatsing van enkele mm aan de bovenkant van de zeshoekige staaf. Dus is deze instabiliteit te wijten aan het spel compatibel met een object van 120 mm hoog. We moeten kijken of de robot iets minder naar beneden kan gaan als de zeshoek correct in de klauwen is geplaatst, of dat het degene is die naar beneden duwt. In dit geval moet de grijper flexibel zijn, zoals schuim of klem met miniveren.
Een andere eenvoudigere oplossing, als deze compatibel is met de volgende bewerkingen op station 2 en 3, zou zijn dat de holte in de bak niet 2 cm is, maar bijvoorbeeld 5 of 10 mm. Dit zou veel bp oplossen.
Subsidiaire vraag wat is het gewicht (of materiaal van uw zeshoekige staaf). Als het plastic is, is het! Omdat het gewicht onvoldoende zal zijn om een minimale ondersteuning te garanderen.
Terwijl u wacht op uw antwoorden op de gestelde vragen, vindt u mijn voorstel om te verbeteren op basis van uw antwoorden, vooral op het gewicht van het onderdeel en de mogelijke mogelijkheden met de robotgrijper.
Persoonlijk denk ik dat het beter zou zijn voor de robot om de munt helemaal naar de bodem te duwen. Dit impliceert een beetje roterende speling van de grijper van de robot. (in overleg)
Als ik de eerste vraag herlees, denk ik dat het belangrijkste punt, en dus de gerapporteerde moeilijkheid, dit is:
Tussen het begin van zijn val en het einde van zijn val in de voetafdruk moet de zeshoek zich 120 graden (2 vlakken) oriënteren.
Ik denk dat de staaf verticaal is gerangschikt en dat de verwachte beweging een spiraalvormige beweging is: rotatie van 120 graden tijdens de translatie van 20 mm. Het is echter noodzakelijk om rekening te houden met de 10 mm aangrijping van de staaf in de bak veroorzaakt door de klem. Dus eigenlijk 10 mm in een rechte lijn, dan 120 graden voor de resterende 10 mm slag, wat een propellerspoed van 30 mm maakt.
Als dit de beweging is die wordt verwacht, kan een spiraalvormige helling geschikt zijn... Maar ik zie geen oplossing als er alleen de randen en vlakken van de stang zijn om de geleiding langs de helling te beperken...
Hallo @Zozo_mp , Bedankt voor je werk en onderzoek, het is erg fijn om de tijd te nemen.
Inderdaad, om het in perspectief te plaatsen, ik heb je verteld dat de munt een centimeter naar beneden ging voordat hij werd losgelaten. Je zou eerder 7 mm moeten overwegen. Toen vertelde ik je dat de voetafdruk 2 cm diep was, maar het is de val die 2 cm is, d.w.z. een diepe voetafdruk van 2,7 cm.
Wat betreft de bewegingen op je video, dit zijn de juiste. Aan de andere kant, zoals je terecht zegt in je laatste bericht: ik moet mijn kamer 120 graden oriënteren tijdens dit najaar. Een spiraalvormige vorm zou misschien kunnen werken. Tot nu toe is het me niet gelukt, omdat de randen van het zeshoekige object de voortgang van het object naar de achterkant van de kamer belemmeren. En afgezien van de randen en platte delen van de zeshoek, kan niets anders me helpen het object te manipuleren.
Voor een beetje meer detail, mijn deel is gemaakt van plastic en aluminium en weegt ongeveer 60 g zou ik zeggen.
Je zei rechtlijnig uit ik zie ineens verschijnen met name in het bericht van @m_blt (die het ook heeft over helling terwijl het onderdeel wordt gebracht door de robotgrijper) en dan met je praten over spiraalvormige beweging.
Nu heb je goed geschreven
Als de grijper van uw robot het onderdeel correct boven de houder plaatst, is de afstellingshoek normaal gesproken minder dan vijf graden met de klok mee of tegen de klok in. Daarom heb ik tellers met een afschuining en een slot pas in de laatste paar mm op de juiste positie gezet. Ik begrijp er helemaal niets van
Tussen seconde 09 en seconde 59 van je video moet het object aan 2 kanten draaien, en dat is mijn probleem. Het spijt me als ik geen duidelijkheid heb, het is niet gemakkelijk om duidelijk te maken
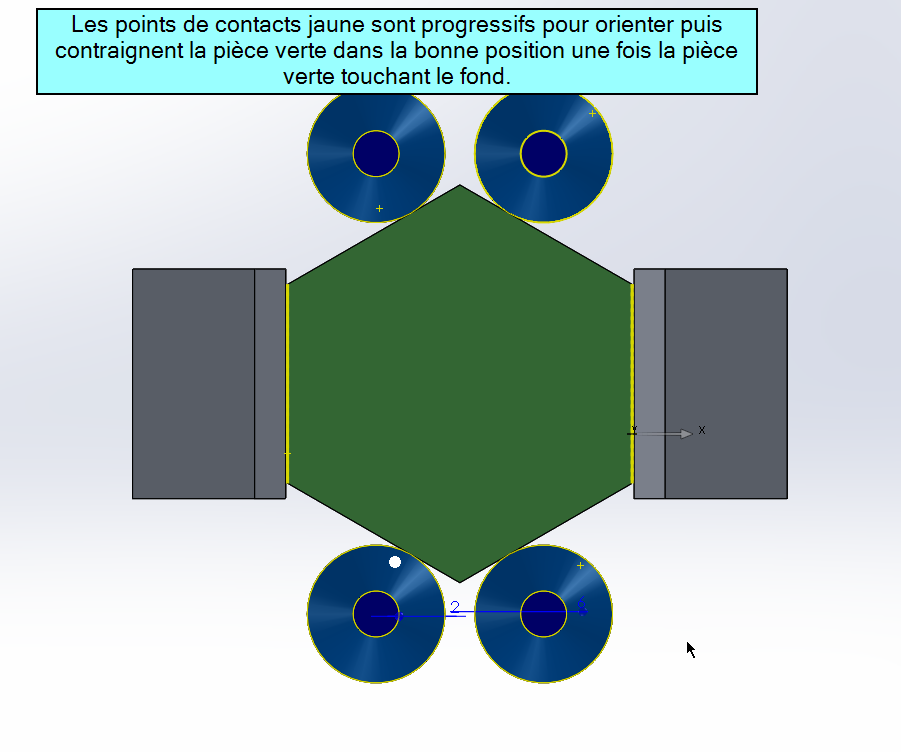
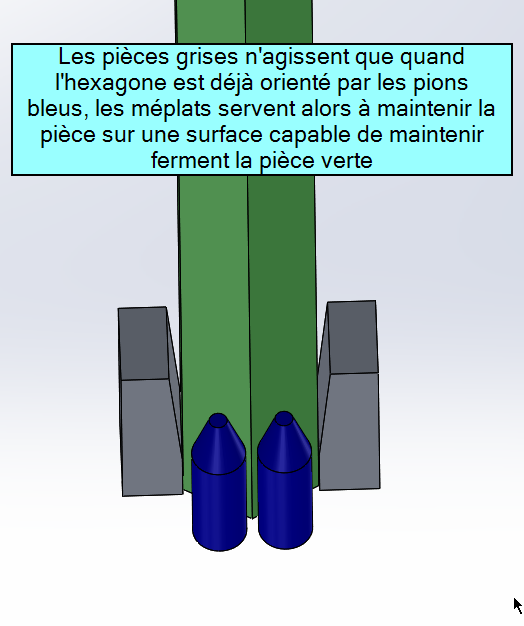
In de video draait het onderdeel niet omdat het bijna in de juiste positie is door de grijper van de robot. De pionnen worden alleen gebruikt om iets opnieuw uit te lijnen voor het geval de klem het stuk niet helemaal presenteert zoals het hoort. De omwenteling van de uitlijning mag in het ergste geval slechts 1 tot 2° per uur of tegen de klok in zijn.
Bent u het ermee eens dat als het object eenmaal in de neerwaartse stand staat, het niet meer in rotatie kan bewegen.
PS: Een houten potlood is 5 gr dus ik stel een andere vraag dan de vertaalsnelheid van de beker tussen stap 1 - 2 en 3. Ik zeg dit omdat je object niet op zijn plaats blijft zitten als het niet voldoende wordt aangedraaid in de cup.
In een speciale machine is het vaak eenvoudiger/betrouwbaarder om alle bewegingen op te splitsen. Persoonlijk zou ik de stortkoker alleen in stand 1 houden, ik zou dan de bak 120° draaien tussen 1 en 2 (misschien door een vinger onder de bak die vast komt te zitten in een nokkenbaan om deze 120° te maken en dan in positie te houden, of anders een vorm van tandrad aan de buitenkant van de bak en een aantal tanden die goed op een vast rek passen die de bak dwingt om beurt...).
Anders moet je misschien nadenken over het toevoegen van een rotatie-as + motorisering op de grijper om deze 120°-beweging tussen de greep en de ontgrendeling te maken (robotarmen hebben vaak een geïntegreerde rotatie-as vóór hun grijper).
Hallo @froussel, precies, dit zijn hele goede ideeën, maar ik wilde me niet te veel aan dit soort oplossingen binden, uit angst voor de precisie van de rotatie
Als de rotatie op de arm wordt gedaan, zouden eenvoudige ingangsafschuiningen voldoende moeten zijn om de oriëntatie van het onderdeel af te ronden (rekening houdend met het feit dat de arm iets geeft tot binnen één of 2 graden: teken gewoon het onderdeel dat met deze 1 of 2 ° is verschoven om te zien welke afschuiningen u op uw emmer moet plaatsen)
Ik geef de voorkeur aan je eerste oplossing met de vinger onder de cup (of een eenvoudige staaf die samenkomt en een vaste nok die de cup 120° draait. Het enige is dat als de bak eenmaal door het rek is, de bak niet meer draait. Dat houdt in dat je een vlakke plek hebt met de afmeting van de onderkant van het tandwiel zodat het niet draait (of een andere slimme oplossing waarvan je het geheim hebt ) Uiteraard is de tweede oplossing flexibeler en betrouwbaarder als je een motor met een wormschroef hebt. Het enige probleem is dat als de transportband 10 meter lang is voor de elektrische voeding, het niet gemakkelijk is, vooral niet met de retour onder de transportketting.
De roterende vergrendeling voor de 120° narotatiefase kan worden gedaan via een platte/schuif die bijvoorbeeld boven het tandwiel-/tandheugelgebied wordt geplaatst (dat zich zelfs onder de bak kan bevinden).