Cześć wszystkim Mam do czynienia z problemem, który uważam za złożony i liczę na to, że pomogą mi Wasze genialne pomysły.
Mam do czynienia z sześciokątnym i prostoliniowym obiektem o wysokości 10 cm, przy czym sześciokąt jest wpisany w wpisane koło o długości 1,5 cm. Umieszczam mój przedmiot w odcisku, który pozwala mi go przekazać (zastosowanie przemysłowe). Obiekt "opada" na spód odcisku stopy na głębokość 2 cm. Oto ograniczenia, których muszę przestrzegać:
Pomiędzy początkiem swojego upadku a końcem upadku w ślad, sześciokąt musi zorientować się o 120 stopni (2 ściany).
Gdy obiekt znajdzie się na dole wcięcia, musi być ograniczony, aby uniknąć obrotu.
Muszę być w stanie wyjąć obiekt z odcisku, zachowując ostateczną orientację, podnosząc go w pionie.
Jeśli to możliwe, chcę, aby odcisk był utrwalony, to znaczy, że chcę uniknąć koncepcji odcisku, który opiera się na ruchu, w rotacji tego odcisku. Jest to obiekt, który musi się w nim obracać.
Więc oto moje pytanie: Czy można sobie wyobrazić projekt, który spełnia wszystkie te ograniczenia? Jeśli tak, czy masz obraz, który pozwala mi wyobrazić sobie kształt, który muszę nadać?
Do tej pory wszystkie wyobrażenia pokazują mi, że byłoby to jak narysowanie okręgu wokół sześciokąta, co sprawiłoby, że straciłbym wszystkie ograniczenia, o których wspomniałem powyżej.
Mam nadzieję, że jasno przedstawiłem mój problem. Nie wahaj się, jeśli masz jakieś pytania i bardzo dziękuję za pomoc.
Przede wszystkim witamy na naszym wspaniałym forum pełnym kompetentnych i miłych ludzi.
Czy mógłby Pan wyjaśnić kilka kwestii?
Przeformułowuję: chcesz przesunąć sześciokątny przedmiot o wysokości 120 mm na przenośniku. Przedmiot ten otrzymamy po upadku (przypuszczam, że z rynny) na dywan. Sześciokątny obiekt porusza się w pozycji pionowej na macie.
Jeśli dobrze rozumiem, twój problem jest prosty do rozwiązania. 1°) cylindryczna cylindryczna rynna, która ustawia część przed jej dotarciem na taśmę 2°) Prowadnice proste, które zapobiegają obracaniu się, a tym samym zmieniają wstępne ustawienie ze specjalnego zsypu.
3°) Z drugiej strony powiedz nam, w jaki sposób chcesz usunąć przedmiot z odcisku od dołu do góry lub upadając we właściwej pozycji, aby przejść do następnego kroku. Opowiedz nam minimum o tym, co dzieje się w następnym kroku, ładowaniu do innej maszyny itp. 4°) Powiedz nam, dlaczego chcesz transportować sześciokątny element w pionie, biorąc pod uwagę raczej mały przekrój 1,5 x 200 mm.
Jeśli dobrze zrozumiałem, PB jest prosty do rozwiązania z kilkoma częściami i bez automatycznego wstępnego pozycjonowania. Atrakcja lądowa jest bezpłatna.
Nie sądziłem, że potrzebujesz więcej kontekstu, ale oto jest: celem jest przesuwanie mojego sześciokątnego obiektu od stacji do stacji na maszynie montażowej. Na stacji 1 umieszczam mój przedmiot w czymś w rodzaju czółenka (nazywamy to wiadrem z przenośnikiem) pionowo. Na stacji 2 kończę montaż tego obiektu, a na stacji 3 przychodzę, aby wyjąć obiekt z wahadłowca/wiadra. Muszę przesunąć mój obiekt w pionie, aby wykonać operacje montażowe na stacji 2. Na stacji 3 chwytam przedmiot za jego górną część, a następnie wyciągam go ruchem pionowym.
Jest to zatem kwestia znalezienia rozwiązania w sprawie kształtu, jaki nadaję odciskowi obecnemu w moim wózku wahadłowym/kubełku przenośnika, odciskowi, który mieści przedmiot.
I wszystko dzieje się moim zdaniem na stacji 1, kiedy przyjeżdżam zdeponować swój przedmiot w promie. Przychodzę go "uwolnić", gdy znajdzie się w śladzie promu. Grawitacja zrobi resztę.
Czy wydaje ci się to jaśniejsze?
Nie wahaj się, jeśli potrzebujesz jeszcze więcej szczegółów. Zbieram zdjęcia i załączam je do Was do dzisiejszego wieczora, aby zilustrować moje słowa.
Czy kubełek przenośnika jest oparty na systemie taśmowym lub łańcuchowym, jak to często bywa?
Który umieszcza przedmiot w wiadrze przenośnika. Czy wpada grawitacyjnie do wiadra. Czy spada z leja samowyładowczego, w którym sześciokątne profile są umieszczane luzem. Jeśli tak, to czy są one umieszczone poziomo czy pionowo. Innymi słowy, czy jest to mechanizm, który uruchamia upadek (wiadro podczas przechodzenia w pionie, czy też jest to ręka operatora, która puszcza sześciokątny pręt?
Kubełki poruszają się po przenośnikach taśmowych. Branża agro czy kosmetyczna korzysta z niego oczywiście bardzo dużo. To jest dobry przykład. W przykładzie, który chcę wam pokazać, białe kubki są dokładnie takie, jakich używam. Mając trudności z przesyłaniem zdjęć, zapraszam do skorzystania np. z poniższego linku:
Obiekty są umieszczane pojedynczo za pomocą chwytaków umieszczonych na końcu robotów. Tak więc mój obiekt jest zawsze składowany zgodnie z tą samą "orientacją". Proces ten sprawia, że mój obiekt znajduje się w tej samej pozycji w zaciskach. Następnie szczypce ustawiają się nad miseczkami, niżej, tak aby wsunąć przedmiot na jeden centymetr do miseczek, a następnie otwierają. Następnie przedmiot spada na dno swojej jamy, do wiadra. To właśnie w momencie tego upadku chcę przeorientować mój obiekt.
Oznacza to, że chwytak robota już umieszcza sześciokąt prawie idealnie, tak aby sześciokąt mógł wpaść do kubka. Wtedy mówisz, że przedmiot spada o 2 cm lub utknął w pozycji w wiadrze.
Oznacza to, że prowadnica wewnątrz łyżki jest używana tylko na 1 cm do pozycjonowania. Jeśli chcesz, aby Twój pręt sześciokątny się nie zachwiał, ślad nie może mieć praktycznie żadnego luzu. 1 zestaw 2/10 spowoduje przemieszczenie o kilka mm w górnej części sześciokątnego pręta. Podobnie jak ta niestabilność wynikająca z gry, która jest kompatybilna z obiektem o wysokości 120 mm. Powinniśmy zobaczyć, czy robot może schodzić trochę mniej w dół, jeśli sześciokąt jest prawidłowo umieszczony w pazurach, czy też jest to ten, który naciska w dół. W takim przypadku chwytak musi być elastyczny, jak pianka lub zacisk z mini sprężynami.
Innym prostszym rozwiązaniem, jeśli jest ono kompatybilne z poniższymi operacjami na stacjach 2 i 3, byłoby to, że wnęka w wiadrze nie wynosi 2 cm, ale na przykład 5 lub 10 mm. To rozwiązałoby wiele bp.
Pytanie pomocnicze, jaka jest waga (lub materiał twojego pręta sześciokątnego). Jeśli jest plastikowy, jest do bani! ponieważ waga będzie niewystarczająca, aby zapewnić minimalne wsparcie.
Czekając na Twoje odpowiedzi na zadane pytania, zapoznaj się z moją propozycją ulepszenia zgodnie z Twoimi odpowiedziami, zwłaszcza w zakresie wagi części i możliwych możliwości z chwytakiem robota.
Osobiście uważam, że lepiej byłoby, gdyby robot popchnął monetę aż do samego dołu. Oznacza to niewielki luz obrotowy chwytaka robota. (do omówienia)
Czytając ponownie początkowe pytanie, uważam, że kluczowym punktem, a tym samym zgłoszoną trudnością, jest to:
Pomiędzy początkiem swojego upadku a końcem upadku w ślad, sześciokąt musi zorientować się o 120 stopni (2 ściany).
Myślę, że pręt jest ustawiony pionowo i że oczekiwany ruch to ruch spiralny: obrót o 120 stopni podczas przesunięcia o 20 mm. Należy jednak wziąć pod uwagę 10-milimetrowe zazębienie pręta w łyżce spowodowane przez zacisk. Więc właściwie 10 mm w linii prostej, a następnie 120 stopni dla pozostałych 10 mm skoku, co daje skok śmigła 30 mm.
Jeśli jest to ruch, który jest oczekiwany, spiralna rampa może być odpowiednia... Ale nie widzę rozwiązania, jeśli są tylko krawędzie i powierzchnie pręta, które ograniczają prowadzenie wzdłuż rampy...
Witaj @Zozo_mp , Dziękuję za twoją pracę i badania, bardzo miło jest nie spieszyć się.
Rzeczywiście, aby spojrzeć na to z innej perspektywy, powiedziałem ci, że moneta spadła o centymetr przed wypuszczeniem. Powinieneś raczej rozważyć 7mm. Potem powiedziałem ci, że odcisk stopy miał 2 cm głębokości, ale to spadek ma 2 cm, czyli głęboki odcisk stopy 2,7 cm.
Jeśli chodzi o ruchy w Twoim filmie, są to właściwe. Z drugiej strony, jak słusznie zauważył Pan/Pani w swojej ostatniej wiadomości: tej jesieni muszę ustawić swój pokój o 120 stopni. Spiralny kształt może zadziałać. Do tej pory mi się to nie udało, ponieważ krawędzie sześciokątnego obiektu utrudniają mu przejście na tył pomieszczenia. I poza krawędziami i płaskimi obszarami sześciokąta nic innego nie może mi pomóc w manipulowaniu obiektem.
Dla trochę więcej szczegółów, moja część jest wykonana z plastiku i aluminium i waży około 60g.
Nie mogę się doczekać, aby Cię przeczytać Szczerze
Powiedziałeś, że prostoliniowy z nagle widzę, że pojawia się w szczególności w wiadomości @m_blt (który również mówi o rampie, podczas gdy część jest przynoszona przez chwytak robota), a następnie mówi do ciebie o ruchu spiralnym.
Teraz dobrze napisałeś
Jeśli chwytak robota prawidłowo ustawi część nad gniazdem, kąt regulacji będzie zwykle mniejszy niż pięć stopni zgodnie z ruchem wskazówek zegara lub przeciwnie do ruchu wskazówek zegara. Dlatego liczniki z fazą i zamkiem ustawiam we właściwej pozycji tylko w ostatnich kilku mm. W ogóle nie rozumiem
Między sekundą 09 a sekundą 59 twojego filmu obiekt musi obracać się na 2 strony i to jest mój problem. Przepraszam, jeśli brakuje mi jasności, nie jest łatwo to wyjaśnić
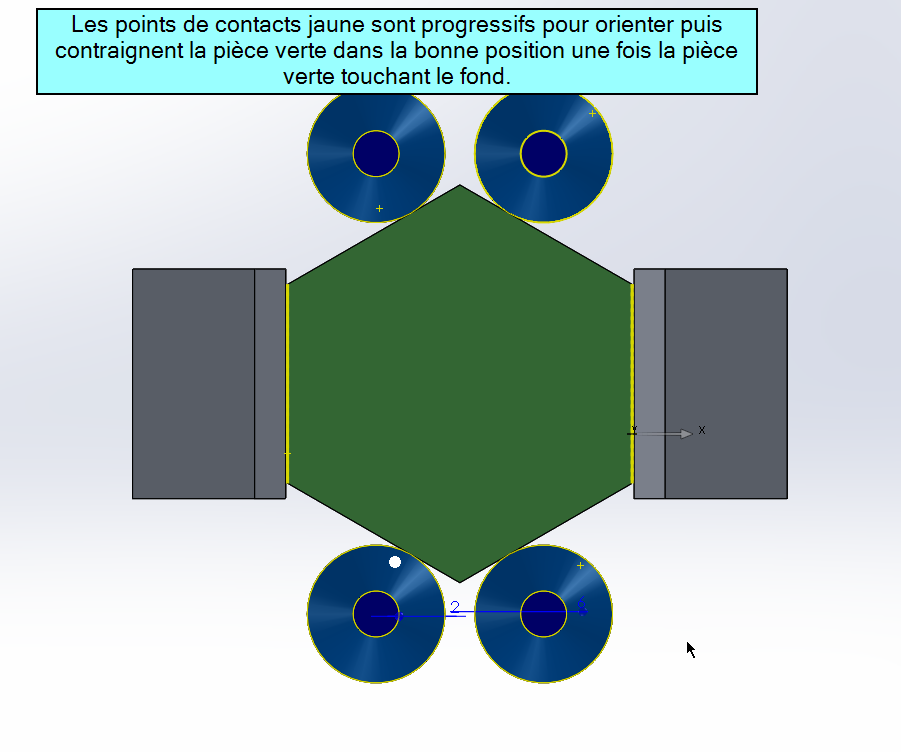
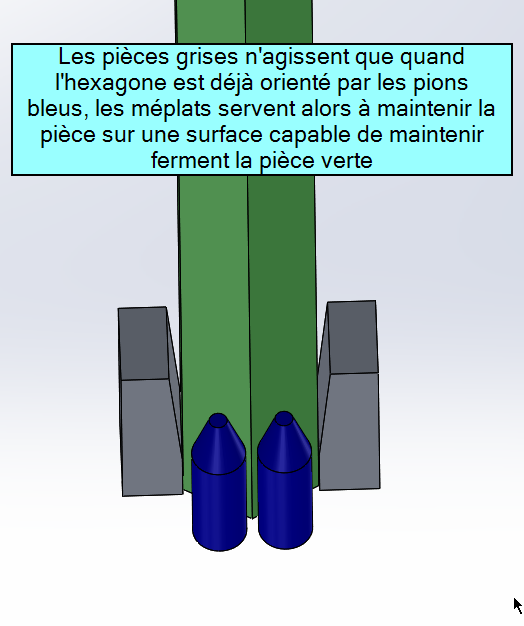
Na filmie część nie obraca się, ponieważ znajduje się prawie we właściwej pozycji przy chwytaku robota. Pionki są używane tylko do nieznacznego wyrównania w przypadku, gdy zacisk nie do końca prezentuje figurę tak, jak powinna. Obrót wyrównania może wynosić tylko 1 do 2° w najgorszym przypadku co godzinę lub przeciwnie do ruchu wskazówek zegara.
Czy zgadzasz się, że gdy obiekt znajdzie się w dolnym położeniu, nie może się już obracać.
PS: Drewniany ołówek ma 5 gr więc zadaję inne pytanie niż szybkość tłumaczenia kubka między krokami 1 - 2 i 3. Mówię to, ponieważ twój przedmiot nie pozostanie na miejscu, jeśli nie zostanie wystarczająco dokręcony w miseczce.
W specjalnej maszynie często łatwiej / bardziej niezawodnie jest rozbić wszystkie ruchy. Osobiście trzymałbym tylko zsyp w pozycji 1, a następnie obróciłbym łyżkę o 120° między 1 a 2 (może palcem pod łyżką, który zahacza o tor krzywkowy, aby zrobić te 120°, a następnie utrzymać w pozycji, lub inaczej kształt koła zębatego na zewnątrz łyżki i kilka zębów, które dobrze pasują do stałego stojaka, który zmusza łyżkę do skręt...).
W przeciwnym razie może być konieczne dodanie osi obrotu + silnika na chwytaku, aby wykonać ten ruch o 120° między uchwytem a zwalniaczem (ramiona robotów często mają zintegrowaną oś obrotu przed chwytakiem).
Jeśli obrót jest wykonywany na ramieniu, proste fazowania wejściowe powinny wystarczyć, aby sfinalizować orientację części (biorąc pod uwagę, że ramię daje coś z dokładnością do jednego lub 2 stopni: po prostu przerysuj część przesuniętą o te 1 lub 2 °, aby zobaczyć, jakie fazowania musisz umieścić na swoim wiadrze)
Wolę twoje pierwsze rozwiązanie z palcem pod kubkiem (lub prostym prętem, który się spotyka i stałym uchem, który obraca kubek o 120°. Jedyną rzeczą jest to, że gdy wiadro przejdzie przez stojak, nie powoduje obracania się wiadra. Co oznacza posiadanie płaskiego miejsca o wymiarze dolnej części przekładni, aby się nie obracało (lub inne sprytne rozwiązanie, którego masz sekret ) Oczywiście drugie rozwiązanie jest bardziej elastyczne i bardziej niezawodne, jeśli masz silnik ze śrubą ślimakową. Jedyny problem polega na tym, że jeśli taśma transferowa ma 10 metrów długości do zasilania elektrycznego, nie jest to łatwe, zwłaszcza w przypadku powrotu pod łańcuchem przenośnika.
Blokada obrotowa dla fazy po obrocie 120° może być wykonana za pomocą płaskiego/suwaka umieszczonego na przykład nad obszarem przekładni/zębatki (który może znajdować się nawet pod łyżką).