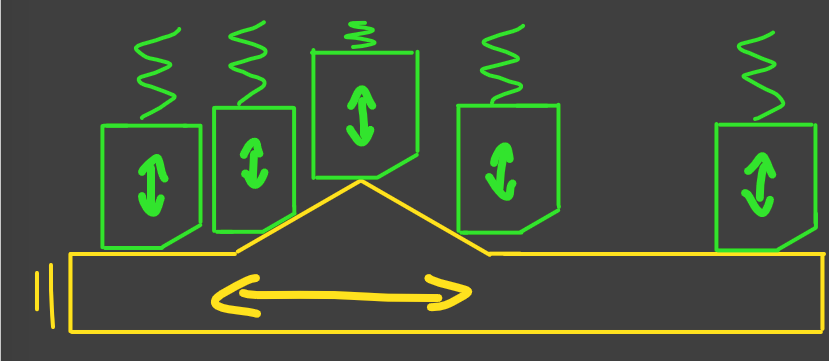
Edit: Ik specificeer dat het gele stuk flexibel is in dezelfde rijrichting als het groene stuk, en daarom dat in feite de 3 onderste hoekpunten van het groene stuk potentiële contactpunten zijn en in staat moeten zijn om zijn positie op het oppervlak van het gele stuk te bepalen.
Ik heb lessen nodig om deze 2 beperkingen te begrijpen... Kwam lijkt te zijn wat ik nodig heb, maar geen manier om " geldige entiteiten" te selecteren... Ik begrijp niet wat hij wil. Het traject is niet beter, zelfs als het me lukt om de parameters te configureren om foutloos te valideren, raken mijn componenten volledig bevroren...
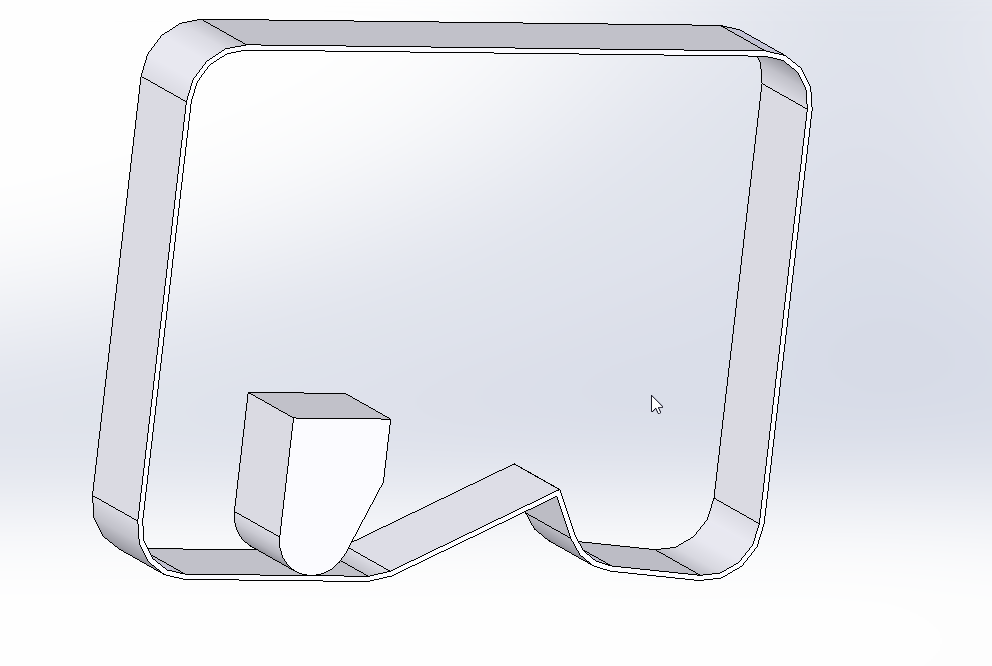
Het probleem is dat ik de indruk heb dat het niet mogelijk is met mijn stuk en het profiel... Van het weinige dat ik begrijp, moeten alle gezichten raaklijn hebben. Behalve dat mijn deel geen eenvoudig geëxtrudeerd profiel is, en als ik plezier moet hebben in het afronden van elke rand... Vooral omdat de groene munt niet helemaal rond gaat, wil ik gewoon dat hij aan één kant schuift.
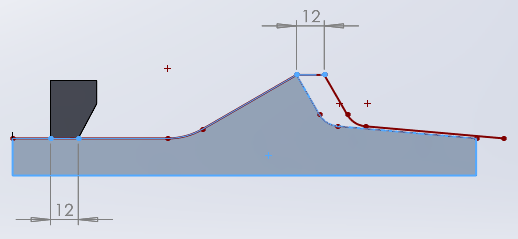
De nokbeperking is niet geschikt omdat er tangensverbindingen voor nodig zijn. Aan de andere kant is het traject een oplossing, als de voorgestelde illustratie klopt.
U hoeft alleen maar een schets te maken met de offsets die op sommige entiteiten goed passen (12 mm op de figuur hieronder)...
Voor een nokkenbeperking heb je een gesloten profiel nodig, zonder scherpe hoeken. En voor het camprofiel heb je een deel van een cirkel nodig. Voorbeeld:
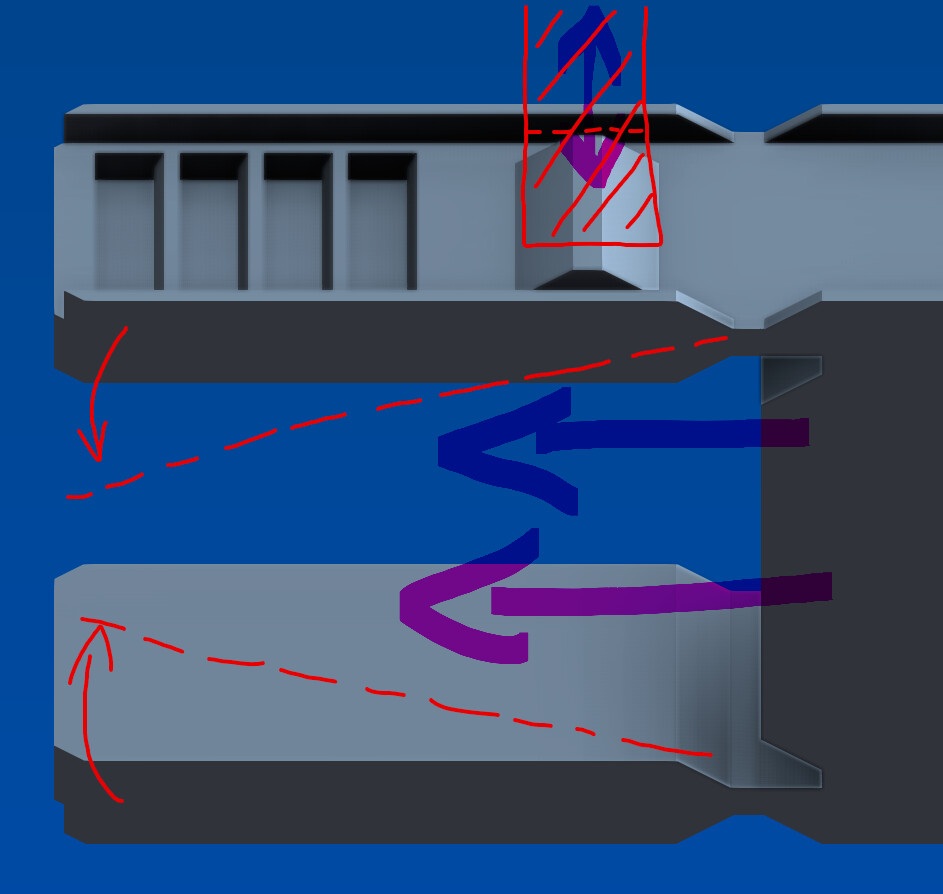
Laten we zeggen dat waar het een beetje ingewikkeld wordt, is dat de " deuken " eigenlijk op flexibele " lipjes " zitten die moeten worden geknepen om het onderdeel los te kunnen maken en verschuiven. De " counter-cam " moet daarom de vervorming van het profiel volgen voordat hij op het oppervlak glijdt.
Het is een beetje lastig om een traject uit te tekenen op een flexibel profiel, nietwaar?