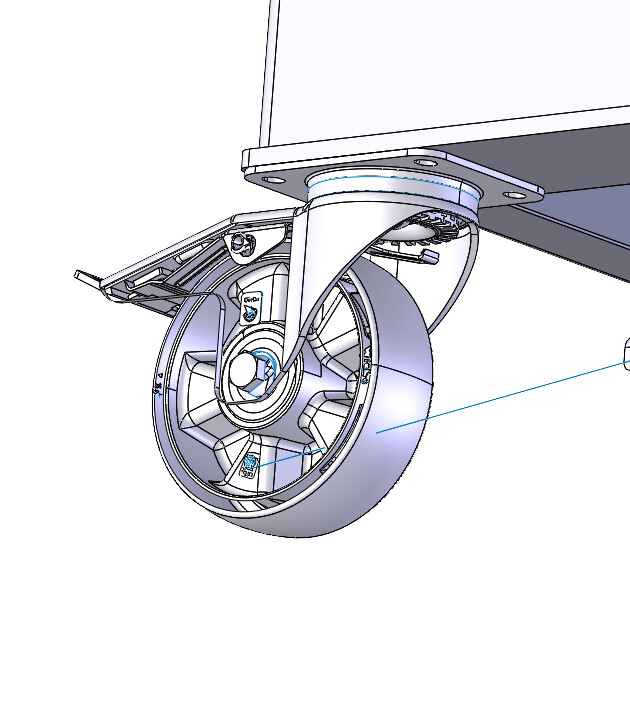
Mon souhait n’est pas de savoir comment se comporte la roulette pivotante sur l’image ci-dessus, mais du charriot sur lequel est fixée la roulette.
Idéalement, je souhaiterais crée un élément rigide qui part du point de contact entre la roulette et le sol et qui se connecte à la surface de contact entre la platine de la roulette et le charriot.
Le point de contact au sol serait bloqué sur ses 3 translations mais libéré selon ses 3 rotations.
NB : tu as le droit de te mettre en meilleure réponse
Edit : en fait non (la meilleure réponse est forcément une reponse). Tu aurais du faire une réponse à ta question pour pouvoir le faire au lieu de t’auto répondre dans la question.
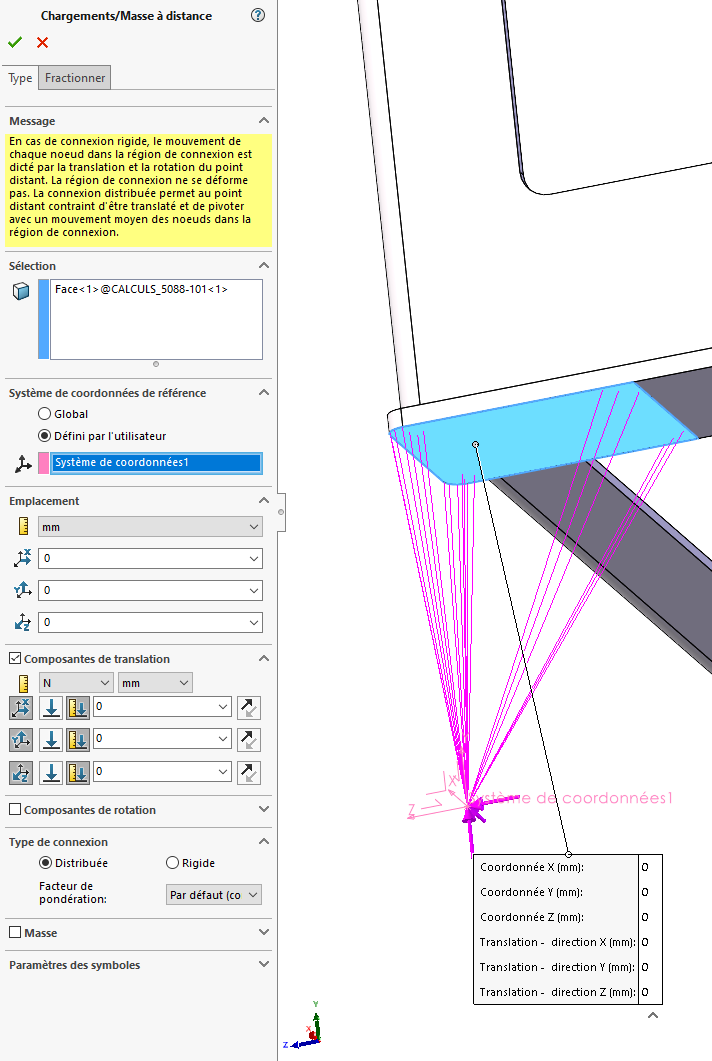
Bon… en écrivant ce topic, je viens probablement tout seul de trouver la solution
Je vais donc vous présenter ma solution et vous demander votre avis sur la pertinence de cette idée :
J’allais vous dire, je veux faire la même chose que les chargements à distance, mais en imposant un déplacement à 0 … Mais en fait, ce module permet déjà de faire cela !