Est-il possible de creer des connecteurs rigide partant d’un cercle (ou d’un cylindre), et convergeant vers un point ?
Mon probleme est le suivant: J’ai un compensateur qui fait la connexion entre 2 elements de gaines via des brides.
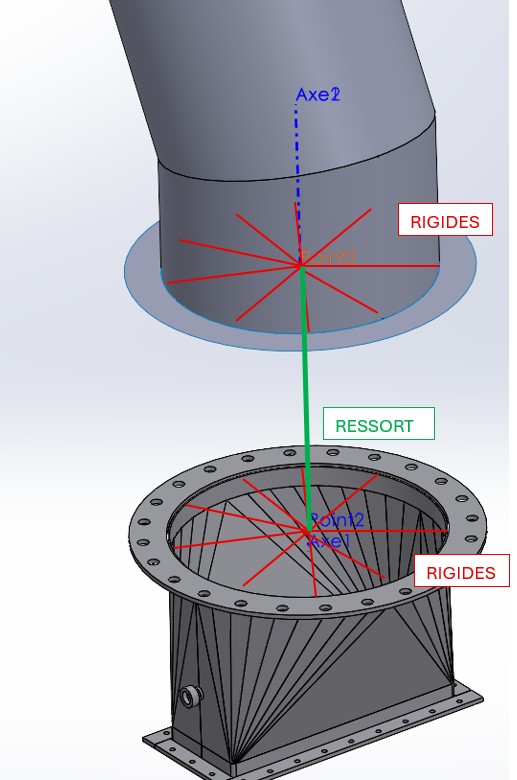
J’ai vu que sous simulation, les connecteurs ressorts permettant d’indiquer les raideurs d’un compensateur ne fonctionnent que sur des points/sommets. J’aurais donc souhaité relier de maniere rigide les contours des brides vers leur centre. Et relier les 2 centres via un ressort.
Question intéressante effectivement.
L’aide simulation montre des choses sur les ressorts entre face mais rien entre points/sommet.
La sélection des deux faces ne te convient pas car tu n’as pas la rigidité en torsion /flexion ?
Bonjour,
Si je comprends bien tu n’as pas Simulation de DS pour faire des essais et tu voudrais savoir s’il est capable de résoudre ton problème. Si tel est le cas pourquoi ne pas confier cette prestation à un BE? Cela sera surement moins onéreux
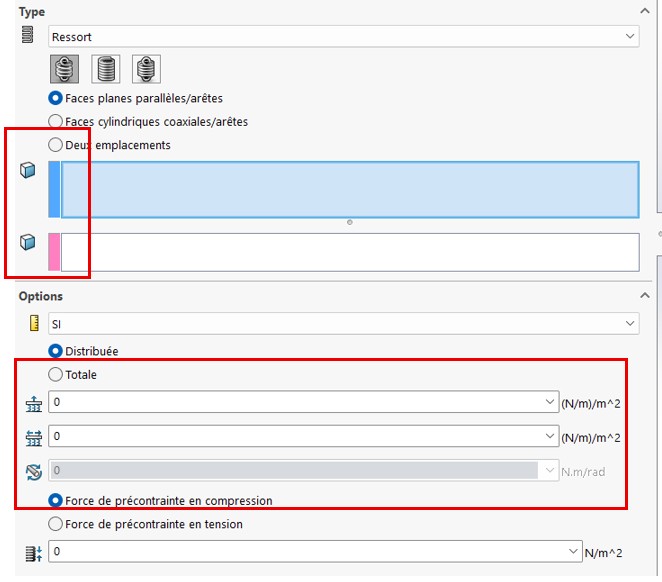
L’aide de Solidworks Simulation indique que les connecteurs ressorts peuvent agir :
entre deux faces planes parallèles, ou
entre deux faces cylindriques coaxiales, ou
entre deux sommets.
A en juger par l’image que vous proposez, la première de ces options semble convenir.
Quel intérêt y a-t-il à passer par des éléments rigides virtuels et un ressort joignant leurs centres ?
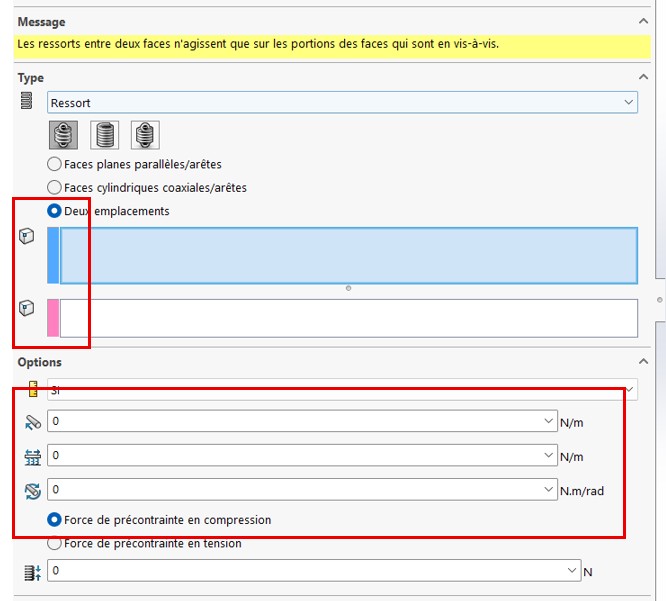
Le probleme est qu’en passant par l’option faces/faces, on perd la possibilité d’indiquer une raideur en flexion du ressort (donnée connu de mon compensateur).
En passant par l’option sommets/sommets, on a bien la possibilité d’indiquer les 3 raideurs (axial, laterale, flexion).
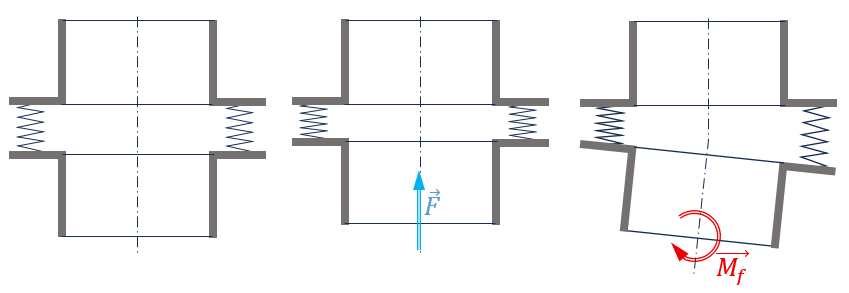
La raideur en flexion du connecteur ressort entre faces se fait naturellement, du fait de la distribution des efforts dans les faces en regard.
L’action du connecteur est décomposée en un ensemble de ressorts élémentaires affectés à chaque facette du maillage.
Un déplacement normal aux faces génère un effort F normal à ces mêmes faces. Et réciproquement.
une rotation autour d’une direction radiale génère un moment radial Mf (flexion). La raideur en flexion est dans ce cas dépendante de la raideur axiale et des dimensions des faces d’appui.
Ce serait typiquement le comportement d’un soufflet.
Pouvez-vous en dire plus sur votre « compensateur » : type, dimensions, raideur axiale et radiale…
Son souci c’est que tu ne peut pas donner de raideur en torsion si tu es plan/plan et d’après l’aide simulation doit gérer un seul gros ressort entre les 2 faces (et pas tout plein de petits).
Donc avec la modélisation plan / plan (qu’il pourrait utiliser avec son modèle).
J’ai essayer de regarder hier et il semble impossible de créer le point central à la face sous simulation.
Ça serait un peu comme une charge distante mais pour les déplacements.
Ça doit valoir le coup de faire une demande d’amélioration car à l’instant T le ressort entre deux points doit être strictement inutile (sauf éventuellement si tu as un modèle en poutres) car on a assez peu de sommet dans les modèles 3D et un ressort ne s’y accroche jamais (il s’accrochera sur un cylindre le plus souvent → impossible à représenter car il faudrait un point central virtuel connecté au modèle 3D).
Deux pistes pour donner une réponse au problème : -1-
Sur le principe du « connecteur rigide » espéré : générer un corps « à rayons », joignant la face plane de la bride du composant supérieur à son centre, corps non fusionné, et créer dans sa partie centrale un détail de forme plaçant un sommet au centre.
Faire de même pour la face de la bride du composant inférieur.
Dans la simulation, déclarer ces deux éléments rayonnés comme étant rigides, donc indéformables (clic droit sur le corps > Rendre rigide).
Le connecteur ressort peut alors être créé entre les deux sommets de ces éléments rayonnants.
Inconvénient : les brides des éléments supérieur et inférieur sont rigidifiées localement par ces rayons indéformables, les zones situées au voisinage de leurs extrémités resteront coplanaires.
C’est peut-être sans inconvénient majeur si les brides ont une rigidité importante.
-2-
Créer le composant « compensateur » sous la forme d’un corps volumique, et le traiter comme tel dans la simulation.
Au niveau calcul discrétiser le compensateur en le remplaçant par 10 (ou plus) ressort plan/plan reliant des portions des 2 brides ne doit pas être trop déconnant : les ressorts peuvent s’écraser/allonger différemment et tu doit retomber sur une rigidité en flexion (pas sûr que ça donne grand chose en torsion par contre).
Je dirais que c’est sûrement moins pire au niveau modélisation que le corps rigide en étoile de @m_blt
Modéliser le compensateur est sûrement le mieux mais cela va donner un modèle lourdingue (les ondulations ont des assez petits rayons avec de la tôle faible épaisseur → maillage à problème).
La modélisation du compensateur en élément coque aurait sûrement tout son sens dans ce cas de figure (plus de chance d’avoir un maillage qui passe, allégement conséquent du nombre de nœuds global).
D’accord pour reconnaître que le corps en étoile n’est pas une solution très satisfaisante, dans la mesure où il rigidifie les brides des gaines…
Mais c’est ce type d’élément que recherchait @Emmanuel_soulier dans son premier message.
Sinon, quoi d’autre, aurait dit George ?
D’où l’idée de simuler le compensateur lui même.
C’est exactement ce que fait le connecteur ressort entre plans parallèles, de façon continue (ou presque, dans les limites du maillage).
Extrait de l’aide SW Simulation : Option Totale ===> La raideur totale est distribuée uniformément sur les faces ou arêtes de coques sélectionnées.
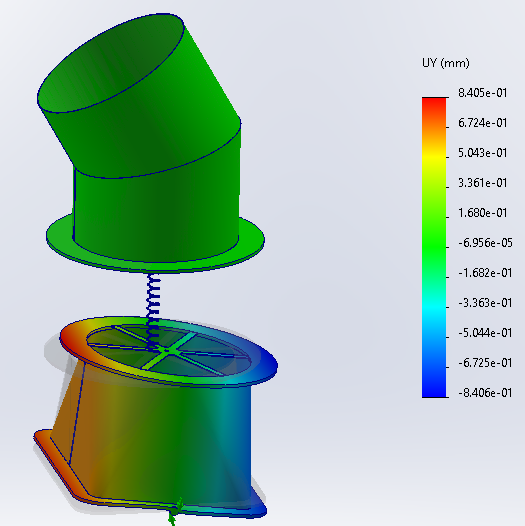
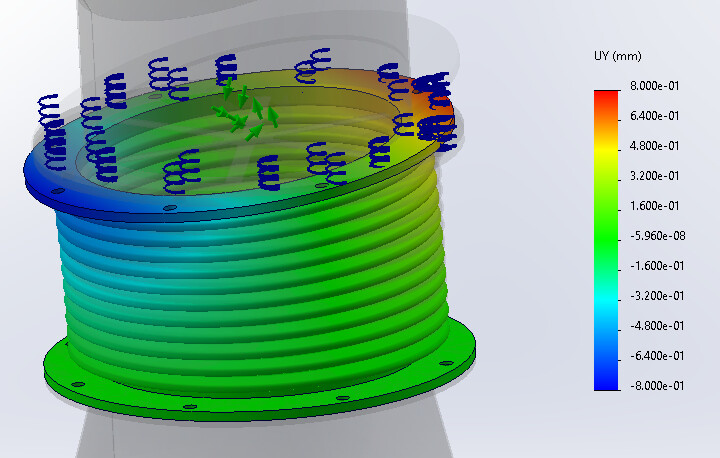
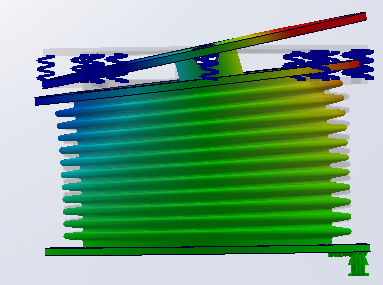
Sur l’illustration ci-dessous, j’ai installé un connecteur ressort possédant seulement une raideur axiale entre deux faces parallèles, l’une sur le compensateur, l’autre sur un composant rigide placé au dessus, auquel est imposé un basculement d’environ 1 degré.
Si la poussée du ressort était purement axiale, le soufflet n’aurait pas cette forme, « comprimée » côté gauche, « tendue » côté droit.
Ce qui confirme que le ressort exerce bien un moment de flexion sur le compensateur.
Raideur en torsion : avec un compensateur du type soufflet, la raideur en torsion doit être considérable. Si des défauts en torsion doivent être compensés, le choix d’un autre type de soufflet me semble indispensable.
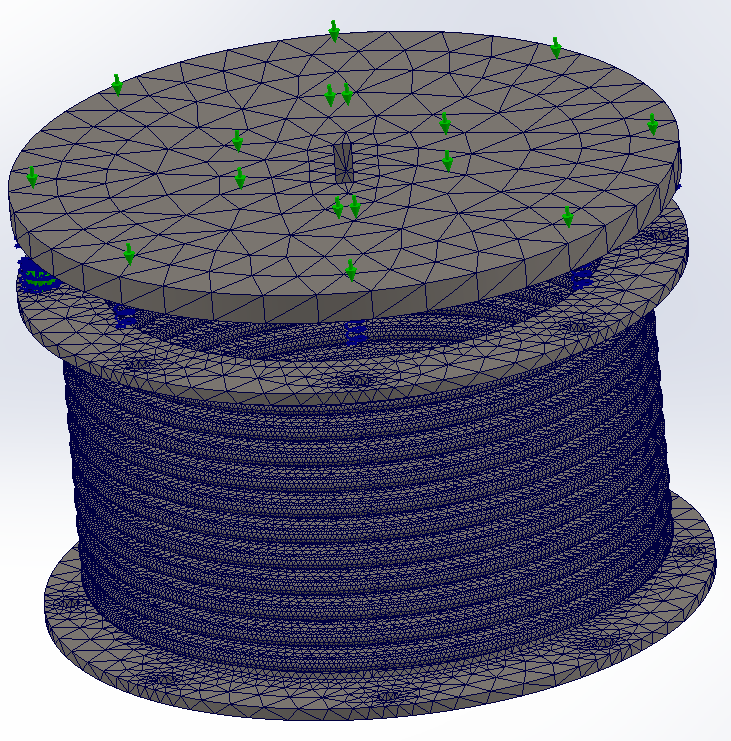
Poids de la simulation du compensateur : la géométrie du compensateur/soufflet est certes torturée, mais la simulation statique ne demande qu’une minute environ avec un maillage relativement fin.
Rien d’inacceptable.
D’autant que le but est de valider le « Connecteur ressort » comme modèle satisfaisant du compensateur. Sur la structure globale du réseau de gaines, le compensateur « géométrique » n’apparaitra pas, remplacé par un connecteur ressort.
J’avais en mémoire que ce genre d’éléments était fortement simplifié (genre 1 seul élément relié aux 2 plans considérés rigides). Si ça n’est pas le cas cela doit être utilisable.
Ta modélisation de compensateur est volumique ou surfacique ?
1 minute parait effectivement assez rapide.
Modèle entièrement « construit à la main » , sur la base d’image glanées sur internet.
Le tout en volumique, pour la géométrie (diamètre soufflet 400 mm, ép. 1 mm) et pour la simulation.
L’idéal serait de disposer d’un modèle issu du fabricant…
Quant à la minute pour le calcul de la simulation, c’est sans le maillage (environ 25 s), et sur un portable « gamer » de bonne facture.
Merci pour toutes vos réponses aidant beaucoup a la réflexion ! Apres échange avec visiativ, on est parti sur la solution de créer une surface « fictive » rigide au niveau des brides permettant de relier le ressort au centre de la face et d’ainsi pouvoir prendre en compte la raideur torsion de notre compresseur.
Si le temps le permet, on fera l’exo de comparer les résultats avec une modélisation sans cette plaque et en passant par les ressorts de face comme presénté par m_blt.