Ist es möglich, starre Steckverbinder zu erzeugen, die von einem Kreis (oder einem Zylinder) ausgehen und sich auf einen Punkt zubewegen?
Mein Problem ist folgendes: Ich habe einen Kompensator, der zwei Kanalelemente über Flansche verbindet.
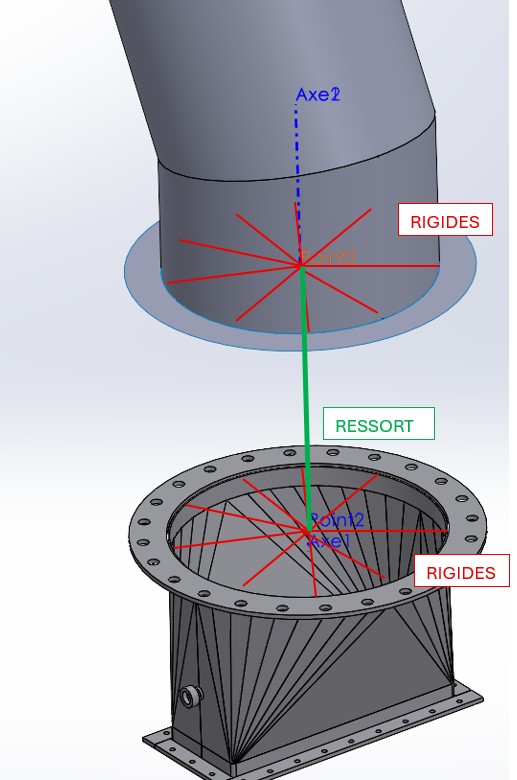
Ich habe gesehen, dass in der Simulation die Federverbinder, die die Steifigkeit eines Kompensators anzeigen, nur an Punkten/Ecken funktionieren. Ich hätte daher gerne die Konturen der Flansche starr in Richtung ihres Zentrums verbunden. Und verbinde die beiden Zentren über eine Feder.
Interessante Frage, in der Tat. Die Simulationshilfe zeigt Dinge über die Federn zwischen den Flächen, aber nichts zwischen Punkten/Eckpunkten. Die Wahl der beiden Seiten passt nicht zu dir, weil du nicht die torsionale/biegige Steifigkeit hast?
Hallo, Wenn ich das richtig verstehe, hast du keine DS-Simulation, um Tests durchzuführen, und du möchtest wissen, ob es dein Problem lösen kann. Wenn das der Fall ist, warum übergeben Sie diesen Service dann nicht einem Designbüro? Es wird sicherlich günstiger sein
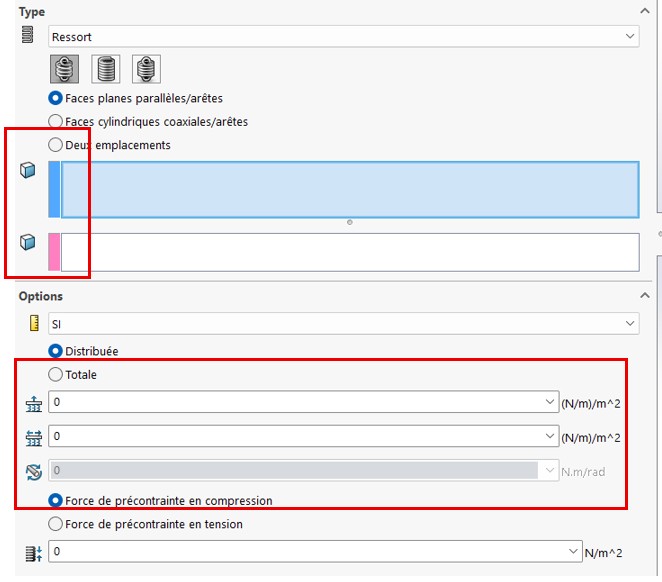
Die Solidworks-Simulationshilfe zeigt an, dass Federverbinder Folgendes wirken können:
zwischen zwei parallelen flachen Flächen, oder
zwischen zwei koaxialen zylindrischen Flächen, oder
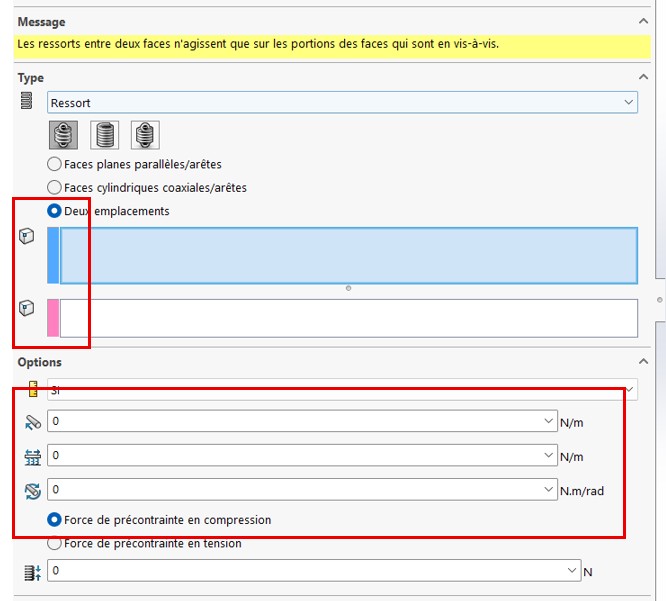
zwischen zwei Gipfeln.
Nach dem Bild, das du vermittelst, scheint die erste dieser Optionen zu passen. Was bringt es, virtuelle starre Elemente und eine Feder zu durchlaufen, die ihre Zentren verbindet?
Das Problem ist, dass man durch die Option Flächen/Flächen die Möglichkeit verliert, eine biege Steifigkeit der Feder anzuzeigen (Daten, die meinem Kompensator bekannt sind).
Indem du die Option Vertice/Vertex durchgehst, kannst du die 3 Steifigkeit (axial, lateral, Beugung) angeben.
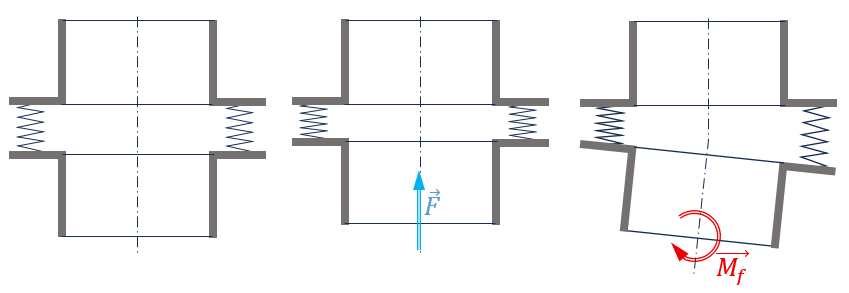
Die Biegfestigkeit des Federverbinders zwischen den Flächen tritt natürlich auf, bedingt durch die Verteilung der Kräfte in den Flächen. Die Wirkung des Verbinders wird in eine Reihe elementarer Federn unterteilt, die jeder Facette des Meshs zugewiesen sind.
Eine Verschiebung, die normal zu den Flächen ist, erzeugt eine Kraft F, die zu denselben Flächen normal ist. Und umgekehrt. Die Rotation um eine radiale Richtung erzeugt ein radiales Moment Mf (Biegung). In diesem Fall hängt die Biegesteifigkeit von der axialen Steifigkeit und den Abmessungen der Lagerflächen ab. Dies ist typischerweise das Verhalten eines Blasebalgs. Können Sie uns mehr über Ihren " Kompensator " erzählen: Typ, Abmessungen, axiale und radiale Steifigkeit...
Das Problem ist, dass man keine Torsionssteifigkeit erzeugen kann, wenn man Plan/Ebene ist, und laut der Simulationshilfe muss man eine einzige große Feder zwischen den beiden Flächen verwalten (und nicht viele kleine). Also mit der Plan-/Ebenenmodellierung (die er mit seinem Modell verwenden konnte). Ich habe gestern versucht zu schauen, und es scheint unmöglich, den Mittelpunkt des simulierten Gesichts zu erzeugen. Es wäre ein bisschen wie eine Fernladung, aber für Reisen.
Es muss sich lohnen, eine Verbesserungsbeantragung zu stellen, denn momentan muss T, die Feder zwischen zwei Punkten, streng nutzlos sein (außer möglicherweise, wenn man ein Balkenmodell hat), da es in 3D-Modellen ziemlich wenige Eckpunkte gibt und eine Feder nie daran haftet (sie hakt meist an einem Zylinder an, → unmöglich darzustellen, da sie einen virtuellen Zentralpunkt mit dem 3D-Modell benötigen würde).
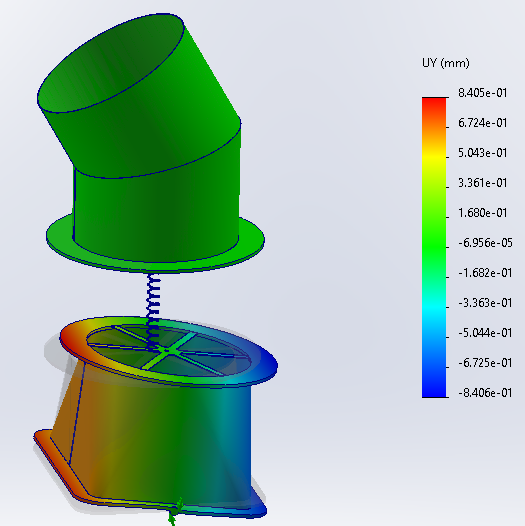
Es gibt zwei Möglichkeiten, eine Lösung für das Problem zu geben: -1- Basierend auf dem erhofften Prinzip des " starren Verbinders": einen " Speichen"- Körper zu erzeugen, der die flache Fläche des oberen Flanschs des oberen Bauteils mit seinem Zentrum verbindet, einen Körper, der nicht verschmolzen ist, und in seinem zentralen Teil eine Form zu schaffen, bei der ein Scheitelpunkt im Zentrum platziert wird. Mach dasselbe für die Flanschfläche des unteren Bauteils. In der Simulation deklarieren Sie diese beiden abgestrahlten Elemente als starr und daher als nicht verformbar (Rechtsklick auf den Körper > Steif machen). Der Federverbinder kann dann zwischen den beiden Eckpunkten dieser strahlenden Elemente erzeugt werden.
Nachteil: Die Flansche der oberen und unteren Elemente werden durch diese nicht verformbaren Radien lokal versteift, die Bereiche in der Nähe ihrer Enden bleiben koplanar. Sie kann ohne größeren Nachteil sein, wenn die Flansche eine erhebliche Steifigkeit aufweisen.
-2- Erstelle die " Kompensator "-Komponente in Form eines Volumenkörpers und behandle sie in der Simulation als solche.
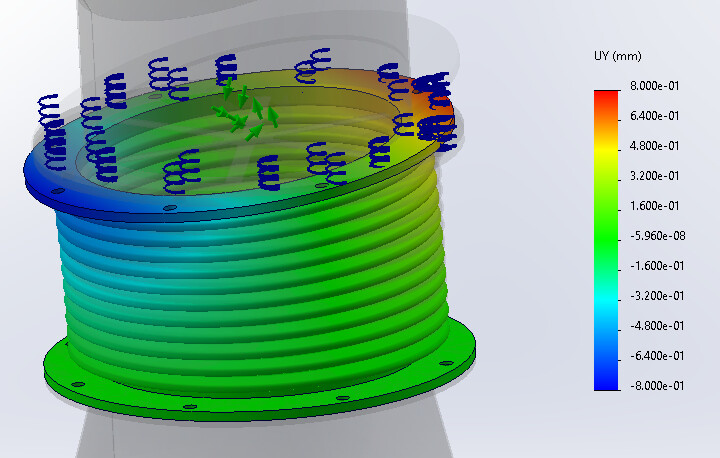
Auf Berechnungsebene sollte es nicht allzu kompliziert sein, den Kompensator durch 10 (oder mehr) Ebenen-/Ebenenfedern zu diskretisieren, die Teile der beiden Flansche verbinden: Die Federn können unterschiedlich abstürzen oder sich verlängern und man muss auf eine Biegesteifigkeit zurückgreifen (ich bin mir aber nicht sicher, ob das bei der Torsion viel nachgibt). Ich würde sagen, dass es in Bezug auf die Modellierung wahrscheinlich weniger schlecht ist als der starre Sternkörper von @m_blt Die Modellierung des Kompensators ist wahrscheinlich am besten, aber es ergibt ein umständliches Modell (die Wellen haben relativ kleine Radien mit dünnem Blech → Problemgitter). Die Modellierung des Kompensators als Shell-Element würde in diesem Fall sicherlich Sinn machen (größere Chance, dass ein Mesh besteht, was zur Verringerung der Anzahl der globalen Knoten führt).
Ich stimme zu, dass der Sternkörper keine sehr zufriedenstellende Lösung ist, soweit er die Flansche der Kanäle versteift... Aber genau dieses Element suchte @Emmanuel_soulier in seiner ersten Nachricht. Wenn nicht, was hätte George sonst gesagt? Daher die Idee, den Kompensator selbst zu simulieren.
Genau das macht der Verbinder, wenn er zwischen parallelen Ebenen herauskommt, kontinuierlich (oder fast innerhalb der Grenzen des Netzes). Auszug aus der SW-Simulationshilfe: Gesamtoption ===> Die Gesamtsteifigkeit verteilt sich gleichmäßig auf die ausgewählten Schalenflächen oder -kanten.
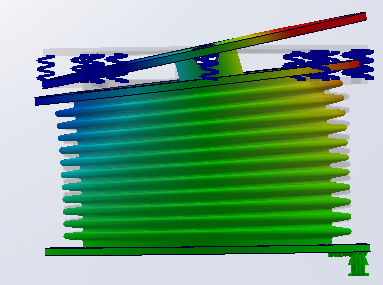
Auf der untenstehenden Abbildung habe ich einen Federverbinder mit nur axialer Steifigkeit zwischen zwei parallelen Flächen eingebaut, eine am Kompensator, die andere an einem starren Bauteil, das oben angebracht ist, bei dem eine Neigung von etwa 1 Grad auferlegt wird. Wenn der Schub der Feder rein axial wäre, hätte der Balg nicht diese Form, "komprimiert " auf der linken Seite, " gedehnt " auf der rechten Seite. Dies bestätigt, dass die Feder tatsächlich ein Biegemoment auf den Kompensator ausübt.
Torsionssteifigkeit : Bei einem Balg-Kompensator muss die Torsionssteifigkeit erheblich sein. Wenn Torsionsdefekte kompensiert werden müssen, erscheint mir die Wahl eines anderen Balgs unerlässlich.
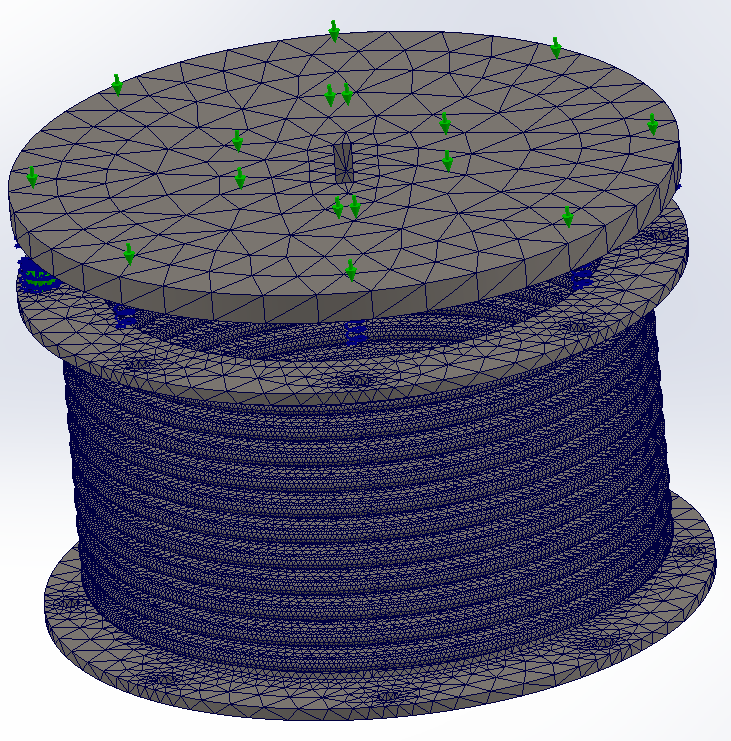
Gewicht der Kompensatorsimulation : Die Geometrie des Kompensators/Balgs ist sicherlich gequält, aber die statische Simulation dauert mit einem relativ feinen Mesh nur etwa eine Minute. Nichts Unannehmbares. Vor allem, da das Ziel ist, den " Federanschluss " als zufriedenstellendes Modell des Kompensators zu validieren. Auf der Gesamtstruktur des Kanalnetzes erscheint der " geometrische " Kompensator nicht, sondern wird durch einen Federverbinder ersetzt.
Ich hatte im Sinn, dass diese Art von Elementen stark vereinfacht ist (also nur ein Element, das mit den beiden Ebenen als starr gilt). Wenn nicht, muss es benutzbar sein.
Modelliert dein Kompensator das Volumen oder die Oberfläche? 1 Minute scheint tatsächlich ziemlich schnell zu sein.
Modell komplett " von Hand gebaut", basierend auf Bildern aus dem Internet. Alles im Volumen, für die Geometrie (Balgedurchmesser 400 mm, Dicke 1 mm) und für die Simulation.
Idealerweise hättest du ein Modell vom Hersteller... Was die Minute für die Simulationsberechnung angeht, so ist es ohne Mesh (etwa 25 Sekunden) und auf einem guten " Gamer "-Laptop.
Danke für all eure Antworten, die mir sehr zum Nachdenken helfen! Nach Gesprächen mit Visiativ entschieden wir uns für die Lösung, eine starre " fictive" Oberfläche an den Flanschen zu schaffen, um die Feder mit der Mitte der Fläche zu verbinden und so die Torsionssteifigkeit unseres Kompressors berücksichtigen zu können.
Wenn die Zeit es erlaubt, werden wir das Exo durchführen, um die Ergebnisse mit einer Modellierung ohne diese Platte zu vergleichen und die von m_blt dargestellten vorderen Federn durchzugehen.