Is het mogelijk om stijve verbindingen te maken die beginnen vanuit een cirkel (of een cilinder) en convergeren naar een punt toe?
Mijn probleem is het volgende: ik heb een compensator die twee kanaalelementen verbindt via flenzen.
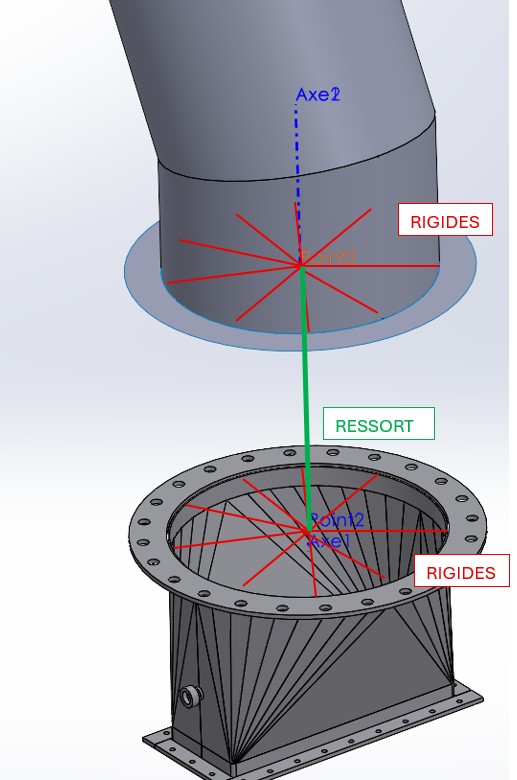
Ik zag dat de veerconnectoren die de stijfheid van een compensator aangeven onder simulatie alleen werken op punten/knopen. Ik had daarom graag de contouren van de flenzen stijf naar het midden toe willen verbinden. En verbind de twee centra via een veer.
Inderdaad een interessante vraag. De simulatiehulp laat dingen zien over de veren tussen de vlakken, maar niets tussen punten/hoekpunten. De keuze van de twee zijden past niet bij je omdat je niet de torsie-/buigstijfheid hebt?
Hallo, Als ik het goed begrijp, heb je geen DS Simulation om tests te doen en je wilt weten of het je probleem kan oplossen. Als dat het geval is, waarom vertrouw je deze dienst dan niet aan een ontwerpbureau? Het zal zeker goedkoper zijn
De Solidworks Simulation-hulp geeft aan dat veerconnectoren kunnen werken:
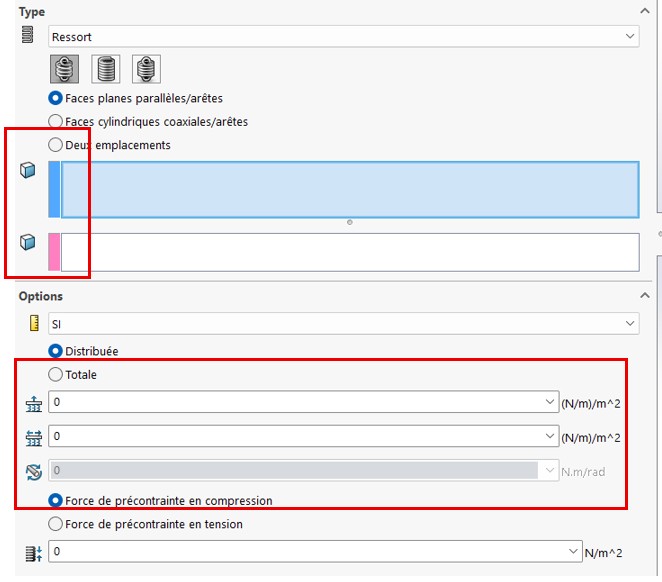
tussen twee parallelle vlakke vlakken, of
tussen twee coaxiale cilindrische vlakken, of
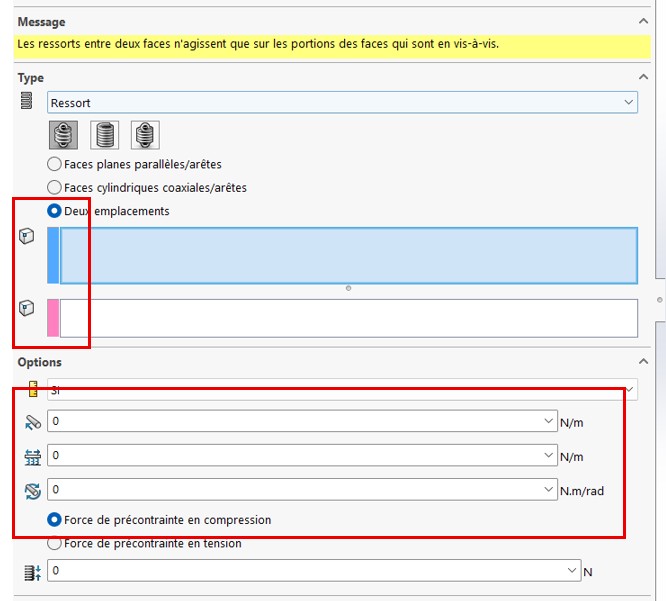
tussen twee toppen.
Afgaande op het beeld dat je geeft, lijkt de eerste van deze opties te passen. Wat is het nut van het doorgaan van virtuele starre elementen en een veer die hun centra verbindt?
Het probleem is dat je door de optie vlakken/vlakken te nemen, de mogelijkheid verliest dat je een buigstijfheid van de veer aangeeft (gegevens die mijn compensator kent).
Door de optie vertice/vertex te nemen, kun je de 3 stijfheid aangeven (axiale, laterale, flexie).
De buigstijfheid van de veerconnector tussen vlakken ontstaat van nature, door de krachtverdeling in de vlakken. De werking van de connector wordt opgedeeld in een set elementaire veren die aan elk facet van het mesh zijn toegewezen.
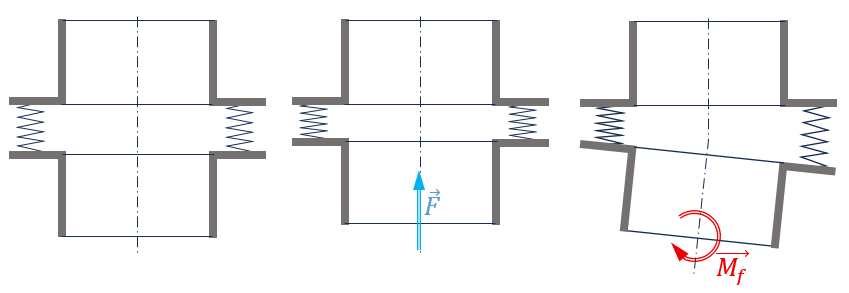
Een verplaatsing loodrecht op de vlakken genereert een kracht F die normaal is op dezezelfde vlakken. En andersom. rotatie rond een radiale richting genereert een radiaal moment Mf (buiging). In dit geval is de buigstijfheid afhankelijk van de axiale stijfheid en de afmetingen van de lagervlakken. Dit is meestal het gedrag van een blaasbalg. Kunt u ons meer vertellen over uw " compensator ": type, afmetingen, axiale en radiale stijfheid...
Het probleem is dat je geen torsiestijfheid kunt geven als je een plan/vlak gebruikt en volgens de simulatiehulp moet je één grote veer tussen de twee vlakken beheren (en niet veel kleine). Dus met het plan/vlak-modelleren (dat hij met zijn model kon gebruiken). Ik heb gisteren geprobeerd te kijken en het lijkt onmogelijk om het middelpunt van het gezicht te maken tijdens de simulatie. Het zou een beetje lijken op een afstandslading, maar dan voor reizen.
Het moet de moeite waard zijn om een verzoek tot verbetering te doen, want op dit moment moet T de veer tussen twee punten strikt nutteloos zijn (behalve mogelijk als je een balkmodel hebt), omdat er vrij weinig hoekpunten zijn in 3D-modellen en er nooit een veer aan vastzit (hij haakt meestal aan een cilinder, → onmogelijk te representeren omdat het een virtueel centraal punt vereist dat verbonden is met het 3D-model).
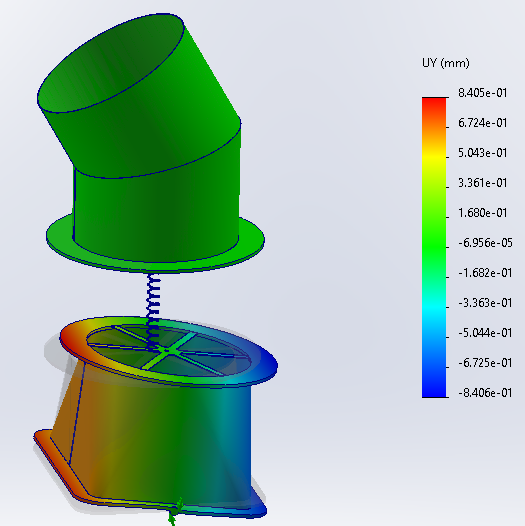
Er zijn twee manieren om een antwoord op het probleem te geven: -1- Gebaseerd op het principe van de " stijve connector" die werd gehoopt: het genereren van een " spaken " lichaam, waarbij het vlakke vlak van de flens van het bovenste onderdeel met het midden wordt verbind, een lichaam dat niet is gesmolten, en om in het centrale deel een vormdetail te creëren waarbij een hoekpunt in het midden wordt geplaatst. Doe hetzelfde voor het flensvlak van het onderste component. In de simulatie verklaar je deze twee uitgestraalde elementen als star, dus niet-vervormbaar (klik met de rechtermuisknop op het lichaam > Maak stijf). De veerconnector kan dan worden gemaakt tussen de twee hoekpunten van deze stralende elementen.
Nadeel: de flenzen van de bovenste en onderste elementen worden lokaal verstevigd door deze niet-deformeerbare stralen, de gebieden in de buurt van hun uiteinden blijven coplanair. Het kan zonder groot nadeel zijn als de flenzen een aanzienlijke stijfheid hebben.
-2- Maak het " compensator "-component in de vorm van een volumelichaam en behandel dit ook als zodanig in de simulatie.
Op berekeningsniveau zou het discretiseren van de compensator door hem te vervangen door 10 (of meer) vlak/vlakveren die delen van de 2 flenzen verbinden niet al te rommelig moeten zijn: de veren kunnen anders crashen/verlengen en je moet terugvallen op een buigstijfheid (ik weet niet zeker of die veel geeft aan torsie). Ik zou zeggen dat het qua modellering waarschijnlijk minder slecht is dan het staride sterlichaam van @m_blt Het modelleren van de compensator is waarschijnlijk het beste, maar het geeft een omslachtig model (de golvingen hebben vrij kleine stralen met dun plaatmetaal → probleemmesh). Het modelleren van de compensator als een shell-element zou in dit geval zeker logisch zijn (meer kans op een mesh die doorgaat, wat resulteert in een vermindering van het aantal globale knooppunten).
Ik ben het ermee eens dat het sterlichaam geen erg bevredigende oplossing is, voor zover het de flenzen van de kanalen verstevigt... Maar het is juist dit soort element waar @Emmanuel_soulier naar op zoek was in zijn eerste bericht. Zo niet, wat zou George dan anders gezegd hebben? Vandaar het idee om de compensator zelf te simuleren.
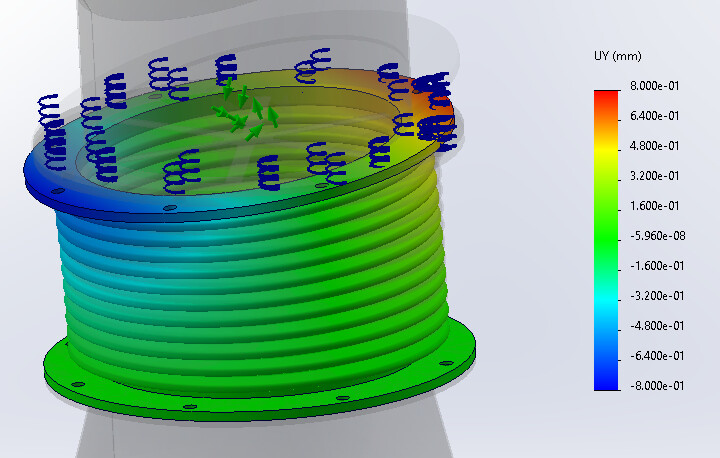
Dit is precies wat de connector doet wanneer hij tussen parallelle vlakken komt, continu (of bijna, binnen de grenzen van het mesh). Fragment uit de SW Simulation-hulp: Totale optie ===> De totale stijfheid is gelijkmatig verdeeld over de geselecteerde schaalvlakken of -randen.
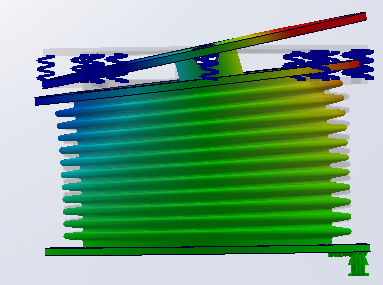
Op de onderstaande illustratie heb ik een veerconnector gemonteerd met alleen axiale stijfheid tussen twee parallelle vlakken, één op de compensator, de andere op een stijf onderdeel bovenop, waaraan een helling van ongeveer 1 graad wordt opgelegd. Als de stuwkracht van de veer puur axiaal was, zou de balg deze vorm niet hebben, " samengeperst " aan de linkerkant, " uitgerekt " aan de rechterkant. Dit bevestigt dat de veer inderdaad een buigmoment uitoefent op de compensator.
Torsiestijfheid : Bij een balgcompensator moet de torsiestijfheid aanzienlijk zijn. Als torsiedefecten gecompenseerd moeten worden, lijkt het mij essentieel om voor een ander type balg te kiezen.
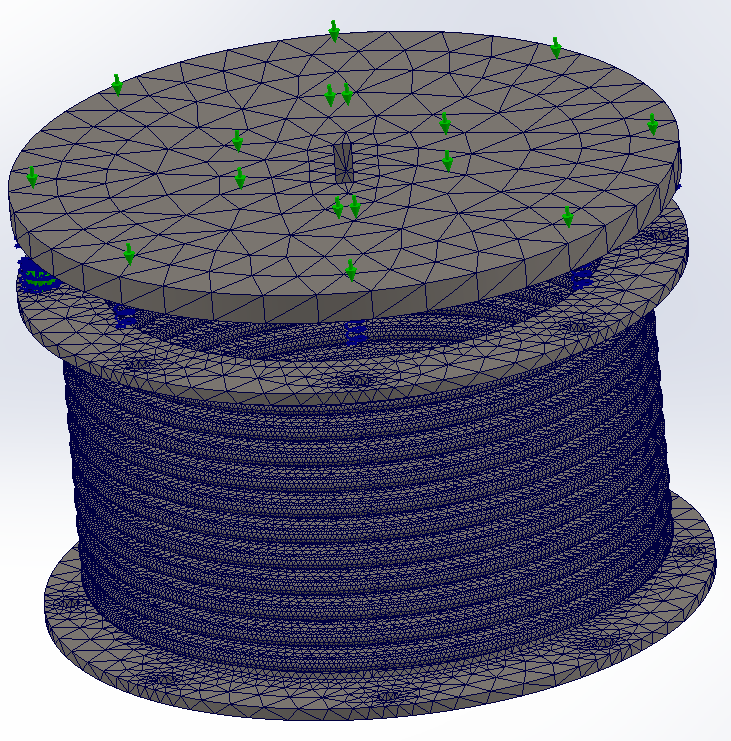
Gewicht van de compensatorsimulatie : de geometrie van de compensator/balg is zeker getormenteerd, maar de statische simulatie duurt slechts ongeveer een minuut met een relatief fijn mesh. Niets onacceptabels. Vooral omdat het doel is om de " Spring Connector" te valideren als een bevredigend model van de compensator. Op de algehele structuur van het kanaalnetwerk zal de " geometrische " compensator niet verschijnen, vervangen door een veerverbinder.
Ik had in gedachten dat dit soort elementen sterk vereenvoudigd waren (zoals slechts één element dat verbonden was met de 2 vlakken dat als star werd beschouwd). Zo niet, dan moet het bruikbaar zijn.
Modelleert je compensator volume of oppervlak? 1 minuut lijkt inderdaad behoorlijk snel.
Volledig " met de hand gebouwd", gebaseerd op afbeeldingen die van het internet zijn verzameld. Alles in volume, voor geometrie (balg diameter 400 mm, dikte 1 mm) en voor simulatie.
Idealiter zou je een model van de fabrikant hebben... Wat betreft de minuut voor de simulatieberekening: dat is zonder mesh (ongeveer 25 seconden), en op een goede " gamer " laptop.
Bedankt voor al je antwoorden, het helpt veel om na te denken! Na overleg met visiativ besloten we een stijve " fictieve " laag bij de flenzen te creëren om de veer met het midden van het oppervlak te verbinden en zo rekening te houden met de torsiestijfheid van onze compressor.
Als de tijd het toelaat, zullen we de exo uitvoeren om de resultaten te vergelijken met een modellering zonder deze plaat en door de voorveren gaan zoals gepresenteerd door m_blt.