Je souhaite pour produire une vidéo de promotion simuler le fonctionnement d’une toupie.
J’ai le choix de le faire avec MECA 3D ou SW Motion. Y a t’il quelqu’un dans la communauté qui a travaillé sur le contact 3D avec l’un ou l’autre? Je recherche un exemple voisin à analyser pour transposer!
Merci de votre réponse.
1 « J'aime »
Bonjour descamps,
c’est une méga question; mais je suis sur que tu pourras trouver une solution dans la communauté.
Bon courage, @+.
AR.
Bonjour @descamps
Tu évoques SW motion qui pourrais convenir mais qui se révèle peu efficace ou convaincant à l’usage.
Les principaux écueils sont
=> programmer le lancement de la rotation initiale qui ne peut être entretenue puisque la vitesse de la toupie diminue.
=> le réalisme peu convaincant des changements de direction et de vitesse lorsque la toupie viendra heurter les flancs du cercle. On constate des accélérations lors de chocs peu conformes à la réalité du monde réel.
En plus vous aurez des images de piètre qualité même en faisant un peu de rendering derrière (image saccadées notamment).
Si c’est pour une promotion je suppose que l’objet existe alors dans ce cas un simple vidéo faite avec n’importe quel téléphone portable vous donnera un bien meilleur résultat en quelque clics basiques.
si @m_blt passe par là il vous parlera de méca3D qui me parait plus évolué que Motion
Cordialement
PS : tu trouveras dans la vidéo ci-jointe une illustration récente qui étayera mes propos
1 « J'aime »
Bonsoir @descamps ,
Il faut croire que les problèmes de contacts intermittents sont délicats à traiter, ruptures/reprises de contact et chocs, et dans ce domaine Meca3D ne fait pas beaucoup mieux que SW Motion. ![]()
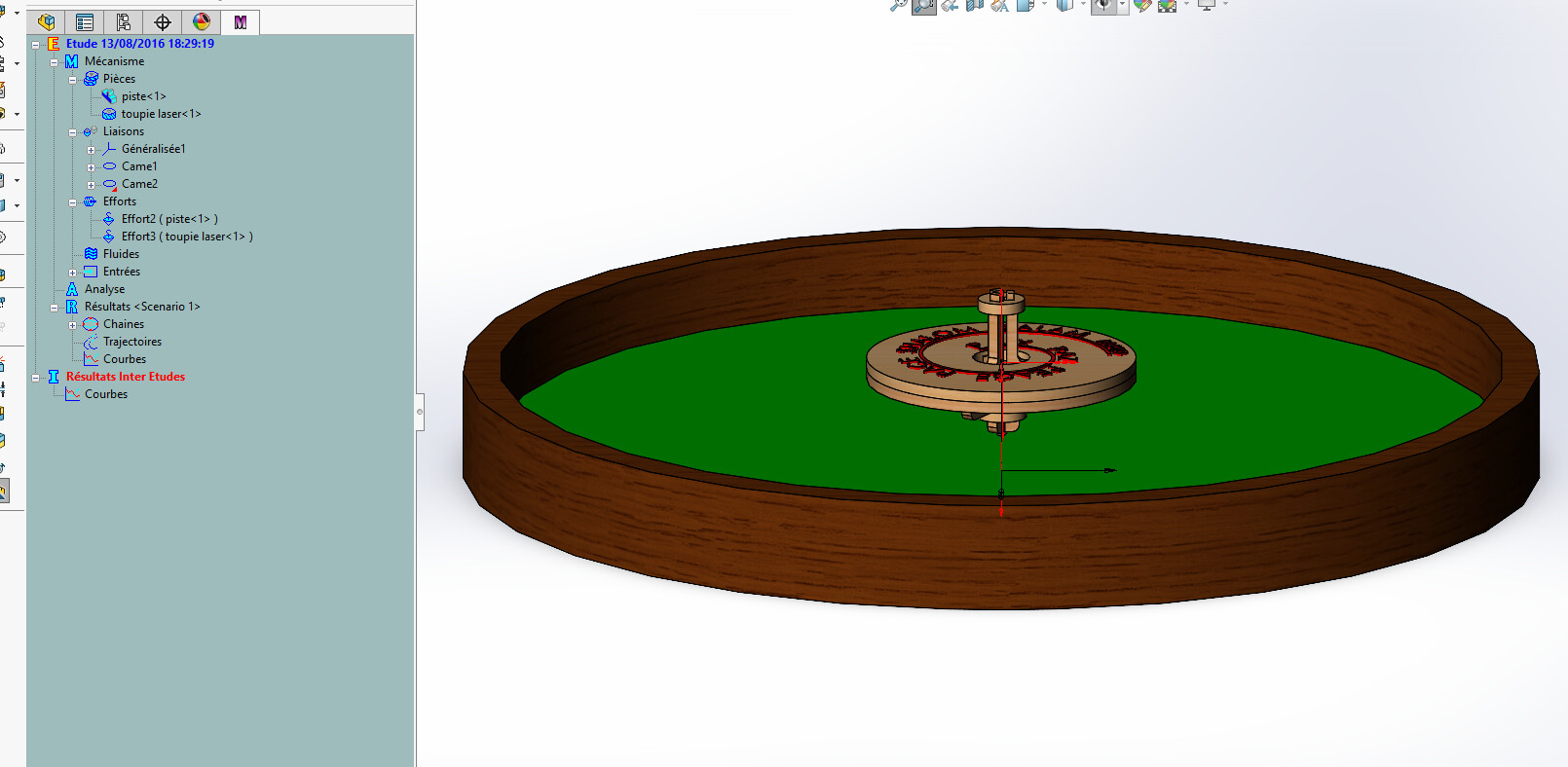
Dans Meca3D, le modèle du « contact 3D » est une liaison de type came ou pneu.
Sur la base d’un modèle rapidement construit, je suis parvenu au comportement illustré par la vidéo ci-dessous.
Un peu de dissipation d’énergie sous forme de frottement au niveau de la « pointe » de la toupie permet de ralentir le mouvement de rotation. Une vitesse de translation imposée initialement est également amortie au fil des rebonds contre les parois, qui sont gérés sans frottement, donc sans « l’effet contre les bandes » cher aux pratiquants du billard…
En revanche, je n’ai pas réussi à traiter de façon satisfaisante la phase terminale de prise de contact de la jante de la toupie avec la piste. Meca3D refuse obstinément d’aller au bout de ce calcul.
Je vais tenter d’améliorer le comportement.
A suivre…
Cordialement.
1 « J'aime »
Bonjour,
Merci pour vos réponses. J’ai pour ma part approfondi la simulation à l’aide de SW motion.
La vidéo jointe montre un comportement qui semble plausible mais les coefficients de frottement ne sont probablement pas réalistes. d’après les graphiques présentés en fin de vidéo, il semble que l’énergie cinétique de rotation se transforme en énergie de translation au contact avec les bords de la piste. le pivotement ne dissipe, semble-t’il, pas suffisamment d’énergie dans ce modèle. Je vais regarder avec MECA 3D. Avez vous des informations sur les algorithmes RK 45, AK3, ARK45 adaptatif dont le choix est proposé pour le calcul de MECA3D. Cela concerne-t’il plus particulièrement le contact 3D?
Je peux partager mes fichiers à votre demande après avoir fait un peu de ménage.
Merci de votre collaboration!
2 « J'aime »
Bravo, félicitation, à mettre dans les annales .
AR.