Ich möchte ein Werbevideo produzieren, um den Betrieb eines Routers zu simulieren.
Ich habe die Wahl, es mit MECA 3D oder SW Motion zu machen. Gibt es jemanden in der Community, der mit dem einen oder anderen an 3D-Kontakten gearbeitet hat? Ich bin auf der Suche nach einem verwandten Beispiel, das ich analysieren und transponieren kann!
Vielen Dank für Ihre Antwort.
1 „Gefällt mir“
Hallo Descamps,
Das ist eine Mega-Frage; Aber ich bin sicher, dass Sie in der Community eine Lösung finden werden.
Viel Glück, @+.
AR.
Hallo @descamps
Sie erwähnen SW motion, das geeignet sein könnte, sich aber in der Anwendung als ineffektiv oder überzeugend erweist.
Die größten Fallstricke sind
=> Programmieren Sie den Start der ersten Drehung, der nicht aufrechterhalten werden kann, da die Geschwindigkeit des Routers abnimmt.
= > den wenig überzeugenden Realismus der Richtungs- und Geschwindigkeitsänderungen, wenn die Spitze auf die Seiten des Kreises trifft. Wir sehen Beschleunigungen bei Schocks, die nicht mit der Realität der realen Welt übereinstimmen.
Darüber hinaus haben Sie Bilder von schlechter Qualität, selbst wenn Sie ein wenig hinterher rendern (insbesondere ruckelige Bilder).
Wenn es sich um eine Werbeaktion handelt, denke ich, dass der Artikel existiert, dann wird Ihnen in diesem Fall ein einfaches Video, das mit einem beliebigen Mobiltelefon erstellt wurde, mit ein paar einfachen Klicks ein viel besseres Ergebnis liefern.
Wenn @m.blt das durchmacht, wird er Ihnen von mecha3D erzählen, das mir weiter entwickelt zu sein scheint als Motion
Herzliche Grüße
PS: Sie finden im beigefügten Video eine aktuelle Illustration, die meine Worte unterstützen wird
1 „Gefällt mir“
Guten Abend @descamps ,
Es scheint, dass die Probleme der intermittierenden Kontakte schwierig zu handhaben sind, Brüche/Wiederkontakte und Stöße, und in diesem Bereich ist Meca3D nicht viel besser als SW Motion. ![]()
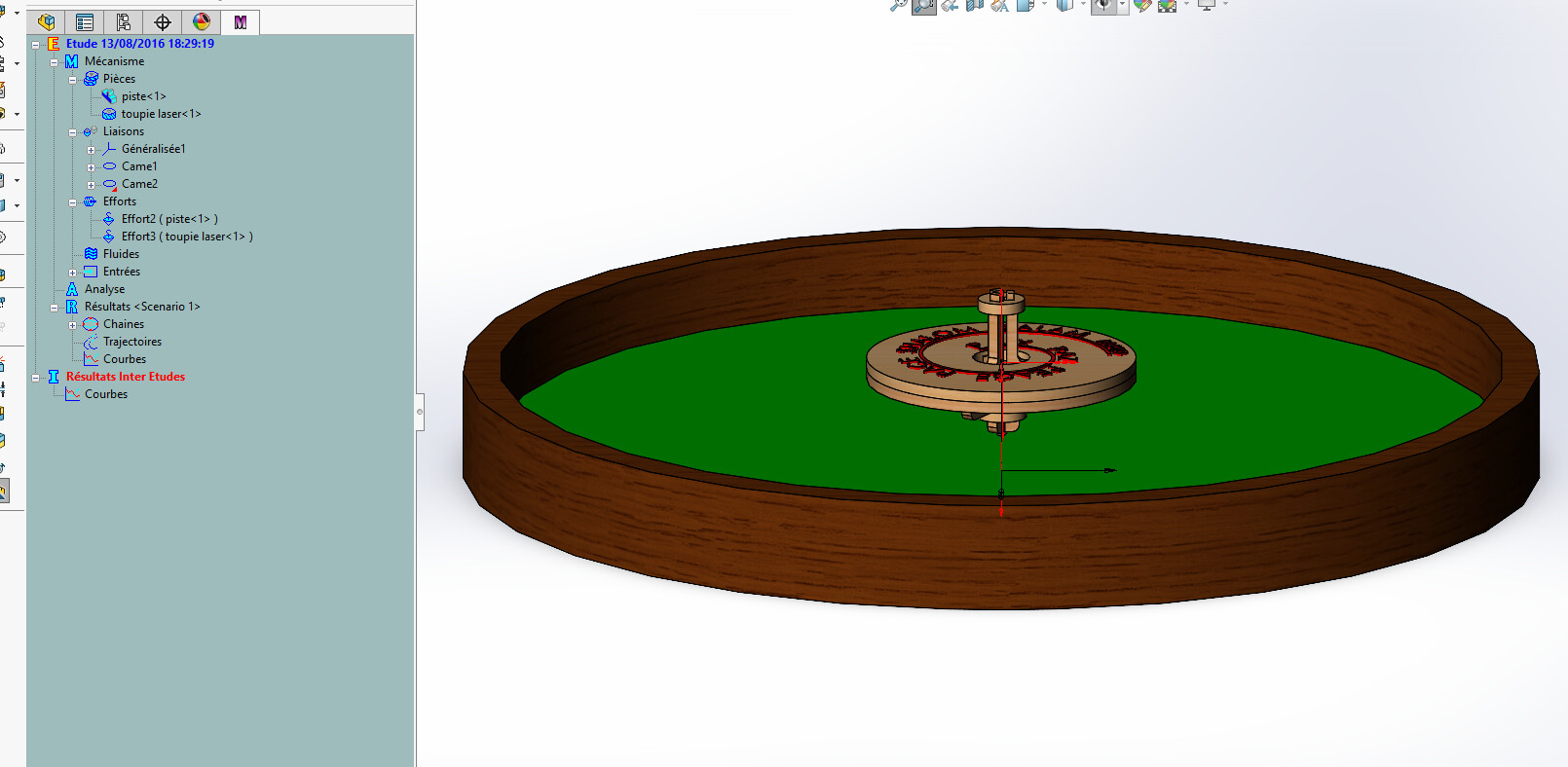
In Meca3D ist das Modell des " 3D-Kontakts " ein Nocken- oder Reifengestänge.
Basierend auf einem schnell erstellten Modell bin ich zu dem Verhalten gekommen, das im Video unten dargestellt ist.
Ein wenig Energieverlust in Form von Reibung an der " Spitze " der Oberseite verlangsamt die Drehbewegung. Eine anfänglich vorgeschriebene Übersetzungsgeschwindigkeit wird auch gedämpft, da sie gegen die Wände prallt, die ohne Reibung bewältigt werden, also ohne den "Effekt gegen die Bretter ", der den Billardspielern lieb ist...
Auf der anderen Seite habe ich es nicht geschafft, die Endphase des Kontakts zwischen dem Rand der Oberfräse und der Schiene zufriedenstellend zu bewältigen. Meca3D weigert sich hartnäckig, bis zum Ende dieser Berechnung zu gehen.
Ich werde versuchen, das Verhalten zu verbessern.
Fortsetzung folgt...
Herzliche Grüße.
1 „Gefällt mir“
Hallo
Vielen Dank für Ihre Antworten. Ich habe die Simulation mit SW Motion vertieft.
Das beigefügte Video zeigt ein Verhalten, das plausibel erscheint, aber die Reibungskoeffizienten sind wahrscheinlich nicht realistisch. Aus den Diagrammen, die am Ende des Videos gezeigt werden, geht hervor, dass die kinetische Rotationsenergie beim Kontakt mit den Kanten der Spur in translatorische Energie umgewandelt wird. Der Drehgelenk scheint bei diesem Modell nicht genug Energie abzuleiten. Ich werde mit MECA 3D suchen. Haben Sie Informationen über die adaptiven Algorithmen RK 45, AK3, ARK45, die für die Berechnung von MECA3D vorgeschlagen werden? Gilt das speziell für den 3D-Kontakt?
Ich kann meine Dateien auf Ihren Wunsch nach einer kleinen Reinigung freigeben.
Vielen Dank für Ihre Mitarbeit!
2 „Gefällt mir“
Bravo, herzlichen Glückwunsch, in die Annalen aufgenommen zu werden.
AR.