I want to produce a promotional video to simulate the operation of a router.
I have the choice to do it with MECA 3D or SW Motion. Is there anyone in the community who has worked on 3D contact with one or the other? I'm looking for a related example to analyze to transpose!
Thank you for your answer.
1 Like
Hello descamps,
It's a mega question; But I'm sure you'll be able to find a solution in the community.
Good luck, @+.
AR.
Hello @descamps
You mention SW motion which could be suitable but which turns out to be ineffective or convincing in use.
The main pitfalls are
=> program the start of the initial rotation which cannot be maintained since the speed of the router decreases.
=> the unconvincing realism of the changes in direction and speed when the top hits the sides of the circle. We see accelerations during shocks that do not conform to the reality of the real world.
In addition, you will have poor quality images even if you do a little rendering behind (jerky images in particular).
If it's for a promotion, I guess the item exists, then in this case a simple video made with any mobile phone will give you a much better result in a few basic clicks.
if @m.blt goes through this he will tell you about mecha3D which seems to me more evolved than Motion
Kind regards
PS: you will find in the attached video a recent illustration that will support my words
1 Like
Good evening @descamps ,
It seems that the problems of intermittent contacts are tricky to deal with, breaks/re-contacts and shocks, and in this area Meca3D does not do much better than SW Motion. ![]()
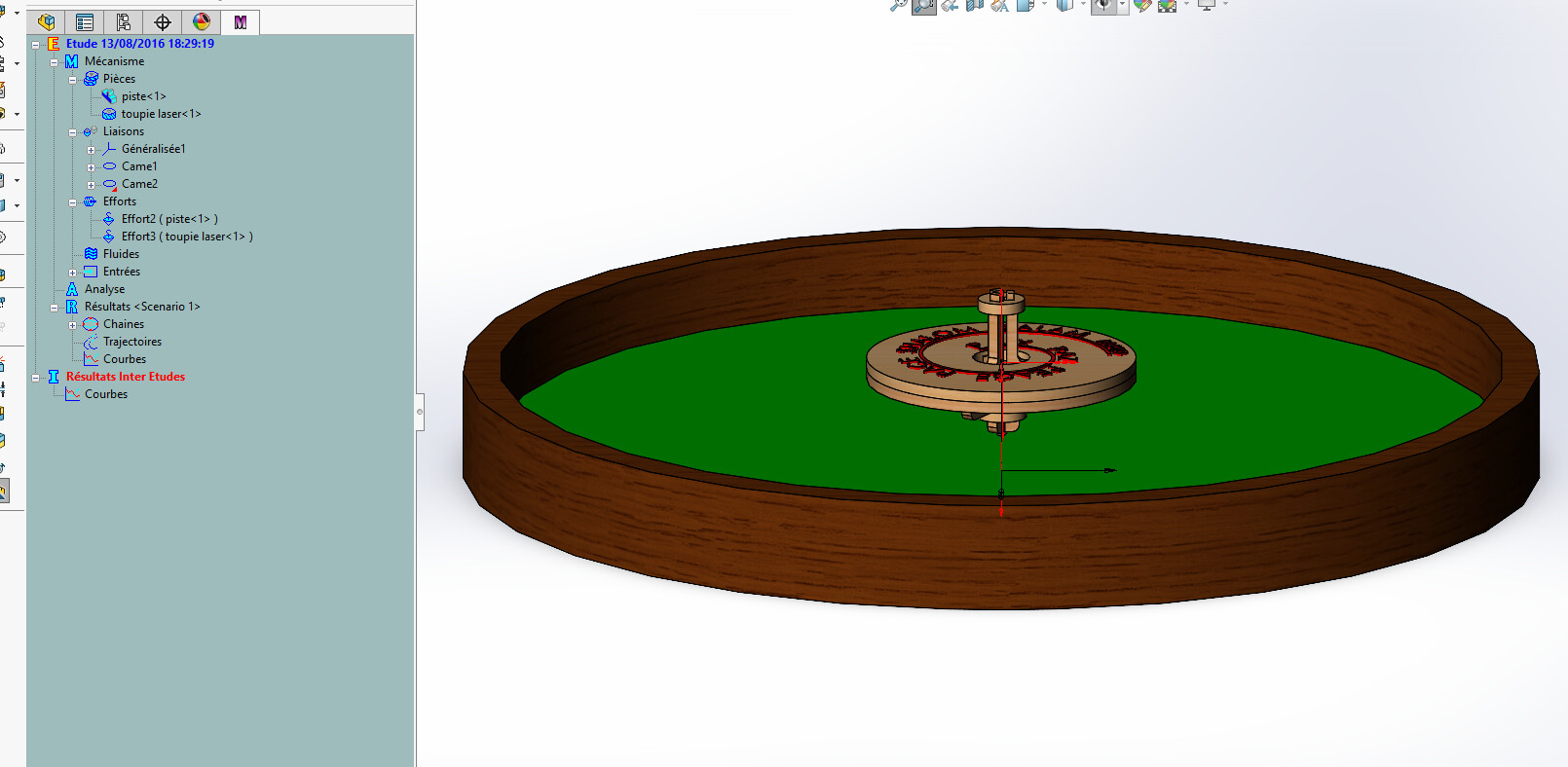
In Meca3D, the model of the " 3D contact" is a cam or tire type linkage.
Based on a quickly built model, I arrived at the behavior illustrated in the video below.
A little dissipation of energy in the form of friction at the " tip " of the top slows down the rotational movement. A translation speed initially imposed is also dampened as the bounces against the walls, which are managed without friction, therefore without the " effect against the boards " dear to billiards players...
On the other hand, I did not manage to satisfactorily deal with the terminal phase of making contact between the rim of the router and the track. Meca3D stubbornly refuses to go to the end of this calculation.
I will try to improve the behavior.
To be continued...
Kind regards.
1 Like
Hello
Thank you for your answers. I have deepened the simulation using SW motion.
The attached video shows behavior that seems plausible but the coefficients of friction are probably not realistic. From the graphs presented at the end of the video, it seems that the rotational kinetic energy is transformed into translational energy at contact with the edges of the track. The swivel does not seem to dissipate enough energy in this model. I'm going to look with MECA 3D. Do you have any information about the RK 45, AK3, ARK45 adaptive algorithms that are proposed for the calculation of MECA3D? Does this apply specifically to 3D contact?
I can share my files at your request after doing a little cleaning.
Thank you for your cooperation!
2 Likes
Bravo, congratulations, to be put in the annals.
AR.