Ik wil een promotievideo maken om de werking van een router te simuleren.
Ik heb de keuze om het te doen met MECA 3D of SW Motion. Is er iemand in de gemeenschap die heeft gewerkt aan 3D-contact met de een of de ander? Ik ben op zoek naar een gerelateerd voorbeeld om te analyseren om te transponeren!
Dank u voor uw antwoord.
1 like
Hallo descamps,
Het is een megavraag; Maar ik weet zeker dat je een oplossing zult kunnen vinden in de gemeenschap.
Succes, @+.
AR.
Hallo @descamps
U noemt SW-beweging die geschikt zou kunnen zijn, maar die in gebruik niet effectief of overtuigend blijkt te zijn.
De belangrijkste valkuilen zijn
=> programmeer het begin van de eerste rotatie die niet kan worden gehandhaafd omdat de snelheid van de router afneemt.
=> het weinig overtuigende realisme van de veranderingen in richting en snelheid wanneer de top de zijkanten van de cirkel raakt. We zien versnellingen tijdens schokken die niet overeenkomen met de realiteit van de echte wereld.
Bovendien heb je afbeeldingen van slechte kwaliteit, zelfs als je een beetje achterblijft (met name schokkerige afbeeldingen).
Als het voor een promotie is, denk ik dat het item bestaat, dan zal in dit geval een eenvoudige video gemaakt met een mobiele telefoon je een veel beter resultaat geven in een paar basisklikken.
als @m_blt dit doormaakt, zal hij je vertellen over mecha3D, wat mij meer geëvolueerd lijkt dan Motion
Vriendelijke groeten
PS: je vindt in de bijgevoegde video een recente illustratie die mijn woorden zal ondersteunen
1 like
Goedenavond @descamps ,
Het lijkt erop dat de problemen van intermitterende contacten lastig zijn om mee om te gaan, breuken/hercontacten en schokken, en op dit gebied doet Meca3D het niet veel beter dan SW Motion. ![]()
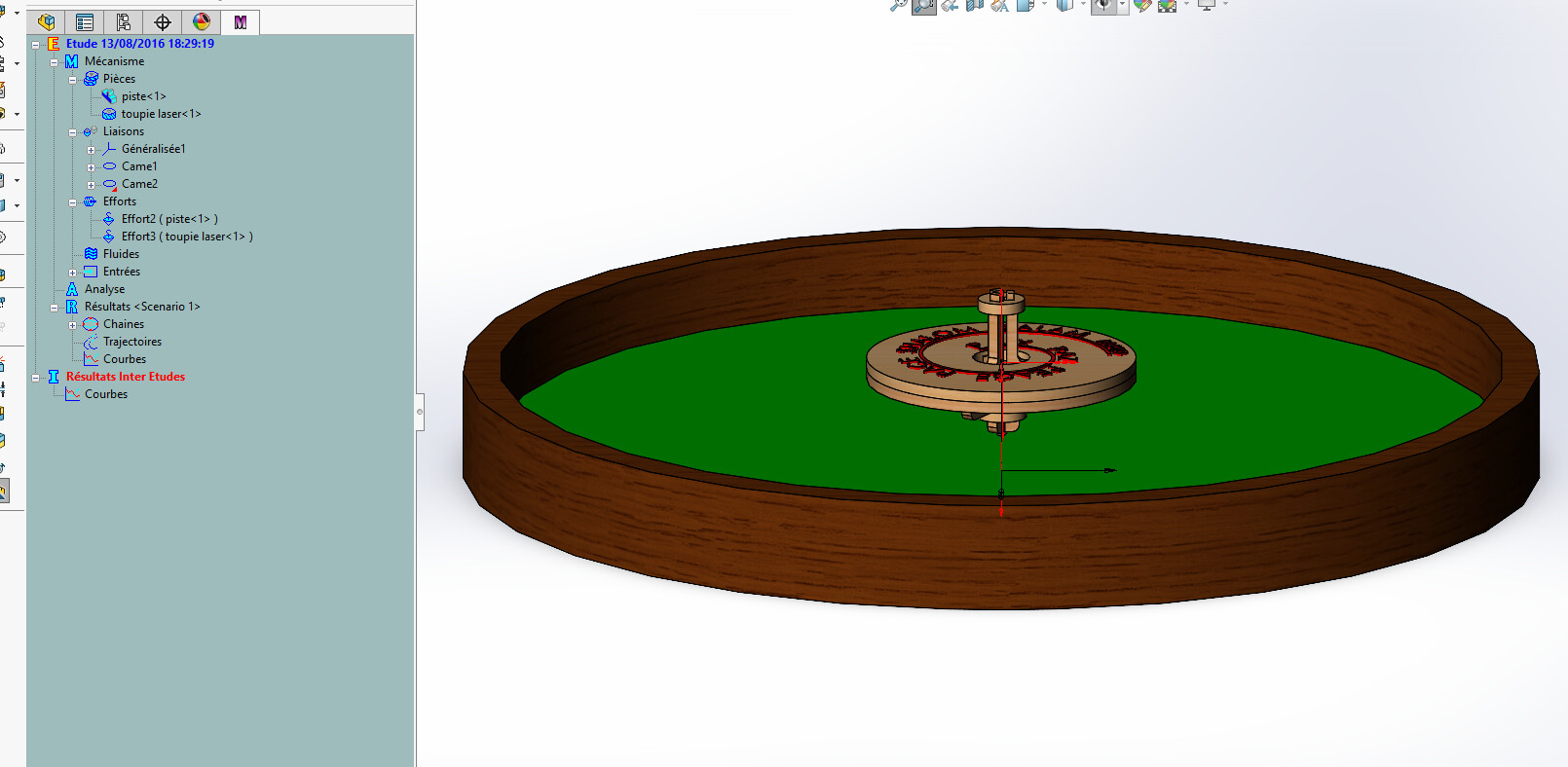
In Meca3D is het model van het " 3D-contact " een nokkenas- of bandtype.
Aan de hand van een snel gebouwd model kwam ik tot het gedrag dat in onderstaande video wordt geïllustreerd.
Een kleine dissipatie van energie in de vorm van wrijving aan de " punt " van de top vertraagt de rotatiebeweging. Een aanvankelijk opgelegde translatiesnelheid wordt ook gedempt omdat de stuitert tegen de muren, die zonder wrijving worden beheerd, dus zonder het " effect tegen de borden " die biljartspelers dierbaar zijn...
Aan de andere kant slaagde ik er niet in om de terminale fase van het maken van contact tussen de rand van de bovenfrees en de baan bevredigend aan te pakken. Meca3D weigert koppig om tot het einde van deze berekening te gaan.
Ik zal proberen het gedrag te verbeteren.
Wordt vervolgd...
Vriendelijke groeten.
1 like
Hallo
Dank u voor uw antwoorden. Ik heb de simulatie verdiept met behulp van SW-beweging.
De bijgevoegde video toont gedrag dat aannemelijk lijkt, maar de wrijvingscoëfficiënten zijn waarschijnlijk niet realistisch. Uit de grafieken die aan het einde van de video worden gepresenteerd, lijkt het erop dat de rotatiekinetische energie wordt omgezet in translatie-energie bij contact met de randen van de baan. De wartel lijkt in dit model niet genoeg energie af te voeren. Ik ga kijken met MECA 3D. Heeft u informatie over de adaptieve algoritmen RK 45, AK3, ARK45 die worden voorgesteld voor de berekening van MECA3D? Geldt dit specifiek voor 3D-contact?
Ik kan mijn bestanden op uw verzoek delen na een beetje opruimen.
Alvast bedankt voor uw medewerking!
2 likes
Bravo, gefeliciteerd, om in de annalen te worden opgenomen.
AR.