I am trying to simulate the resistance of a spring in a push button, and I would like to apply a force on the said button so that it is fully pressed when the minimum desired force is applied to it.
Do you have a tutorial detailed enough for a neophyte (it's for a final year IS project)
Have you done a search on the web?, because there is no shortage of tutorials. It's up to you to choose the one whose level suits you.... After that, if you really try to simulate the deformation of a spring according to the thrust, it gets complicated, because a lot of parameters come into play.
No need for simulation for this kind of calculation (unless simulation is the object of the project but I doubt). Look at the docs of spring manufacturers (Vanel to quote a well-known one), I'll be nice: the basic equation of a spring is F=kx.
The simulation of the project is indeed the purpose of the project; in IS Project (ISP), you must first simulate (to be sure what you have imagined works) before experimenting. I don't have to calculate anything in the simulation; just to simulate the mechanism under the amazed eyes of the teachers. For your information, I make a tote bag with power drive and I have to ask for more or less power by checking that the force at the handle does not exceed 40 N.
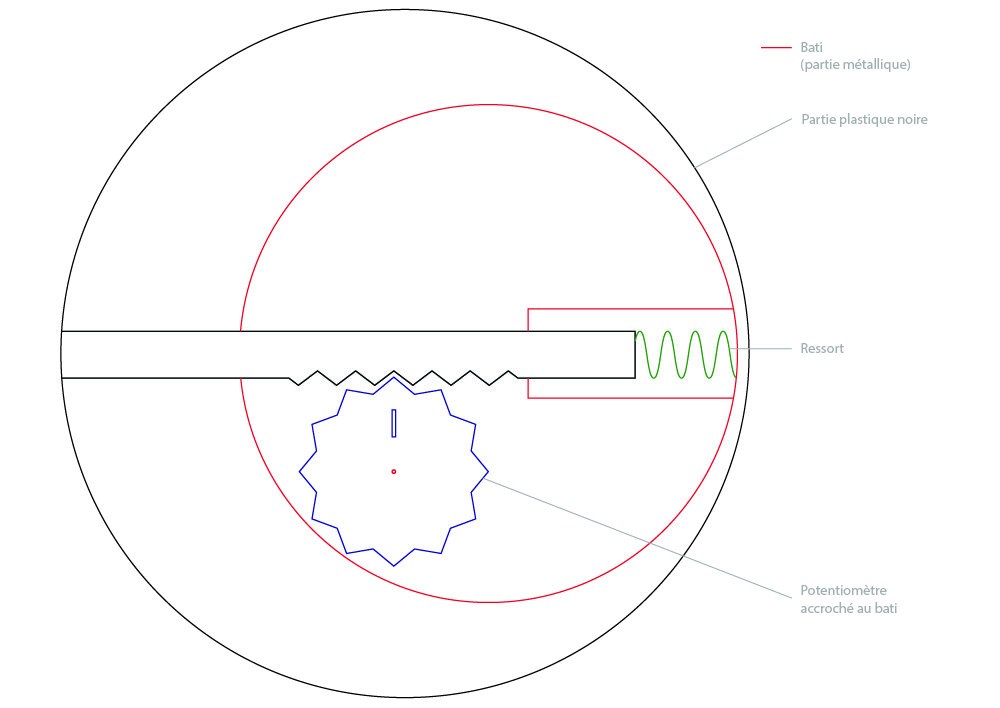
Here is the complete mechanism (the user pulls to the right):
In the meantime I found this tutorial, I'll keep you posted:)
[[[ I don't have to calculate anything in the simulation; just to simulate the mechanismunder the astonished eyes of the teachers.. ]]]
@ CreativC
For a teacher to be amazed, it must take a little more than that. Especially if he's a real teacher , your system would have to be at least potentially functional, which in my opinion is far from being a given.
Especially since at first glance your system will do stop and go and pull on the person's arm. In addition, impossible to do with a six-wheeled cabat.
QUESTION : Why do I say this????????
Where it's going to be funny is in the sharp turns or zigzags in the market (Guess why!)
"the amazed eyes" was ironic; anyway the teachers are not interested in the project and put lessons on the project hours
Indeed, the two-wheeled tote bag ; I took a Google image looking at the resemblance of the handle and forgetting about the wheels.
I'm also afraid of jolts and I was thinking of not putting immediate reactivity but of putting a latency to the acceleration: that the speed only increases if the user maintains traction for a second and to put a maximum acceleration and deceleration. This "smoothing" will not be simulated in SolidWorks but in Matlab.
Keep in mind that the wheels in the inside turn are slower than the outside in case you have only one engine.
You'd rather put a linear knob rather than a gear thing that makes an unnecessary complication. Rather than putting a latency (one second is too much), calculate the average speed of the pedestrian and make the adjustment in positive or negative with respect to the curve and move the motor value on either side of the curve.
Also, if you have time, simulate the effort required to move the load on flat ground and on more or less steep hills. This will decrease the stop and go if you have a feedback loop that allows you to dose according to the crossing effort. This will also help you to mount the mini-sidewalks for people with reduced mobility.
Don't forget either that once the inertia of the start has been overcome, the effort to move forward is less and therefore must be calibrated according to the load : always to avoid the stop and go phenomenon.
the following exchange goes a little beyond the framework of this forum dedicated to SW. But although I'm slightly younger than you but there's no shortage of ideas ;-) So nothing prevents us from talking about possible avenues.
In two words:
You are in your final year of high school, which means that despite all your enthusiasm and your current knowledge, you may not have the skills that you acquire in the schools of the following cycles. So be careful not to set the bar too high.
I think your idea of a potentiometer is good but on the condition that you have a slightly sophisticated electronic servo. I don't think it's easily achievable unless you've been super sharp in electronics since you were a child.
On the other hand, as you are certainly clever, you can get around the difficulty. ;-) :-)
You obviously know about two-wheeled hoverboards and if you look closely what makes it move forward or brake is a relative inclination to the ground.
So if you put a plastic drum or a wooden or cardboard box on the hoverboard, well you have 80% of your solution. Then it's up to you to see how to repatriate the electronics at the handle. For the power supply of the motors it's only a question of wiring.
For your remark on the difference between short people and the basketball champion from the point of view of size. I think that if you look at the wheeled cables, you have a handle height adjustment (otherwise you make one like for the crutch adjustment).
I think that in addition if you design your handle slightly differently you should set the pb at least on a theoretical level. If you look for yourself you will see that your wrist has a variable angle in relation to a plane parallel to the ground. It's by amplifying this angle with a differently designed handle that you solve the problem (I won't tell you more although you've already seen what I'm thinking about hundreds of times without paying attention)
In addition, if you make the variable angle handle system adjustable: note that you solve the problem of people's height at the same time.
I won't tell you more than that, it's up to you to gamble ;-)
Sorry Zozo; But the teacher told me to simplify the mechanism and settle for the simulation of the basic mechanism of the handle. Exit the relative inclination, even if I keep the handle at an adjustable angle. All that remains is to simulate the spring. If I mark the subject resolved; Can I reopen it if I have a simulation problem?
I would like to draw your kind attention to the fact that it is almost easy to calculate a spring.
Springs were calculated long before the appearance of the transistor, then the microprocessor, then the computer, then CAD software, then PEF simulation.
For you, the calculations should not present any difficulty; Since you are in high school and you were talking about Mathlab if I am not mistaken.
What STANDS OUT of all this is that the spreadsheet has a better chance of satisfying your teacher than a smoky presentation that will be wrong anyway by doing simulation under SW. The goal is to teach you how to design and stimulate your inventive abilities and to confront the difficulties inherent in developing systems.
I hope you learned a few things from talking to us. Keep us informed of the score obtained ;-)
You're right, but drawing a spring like that without having an idea of the size of the wire, especially the material, the number of turns according to the curve (knowing that only one part of the compression curve is usable) is to complicate the problem significantly.
Whereas if we start with a spring with almost the desired characteristics, we can actually make a simulation that will confirm part of the calculation.
However, since it's not really achieving the purpose if there was a mistake, it' s not a big deal. ;-)