Hallo
de volgende uitwisseling gaat een beetje buiten het kader van dit forum dat aan SW is gewijd. Maar hoewel ik iets jonger ben dan jij, maar aan ideeën geen gebrek ;-) Niets weerhoudt ons er dus van om te praten over mogelijke wegen.
In twee woorden:
Je zit in je laatste jaar van de middelbare school, wat betekent dat je ondanks al je enthousiasme en je huidige kennis misschien niet over de vaardigheden beschikt die je op de scholen van de volgende cycli opdoet. Pas dus op dat je de lat niet te hoog legt.
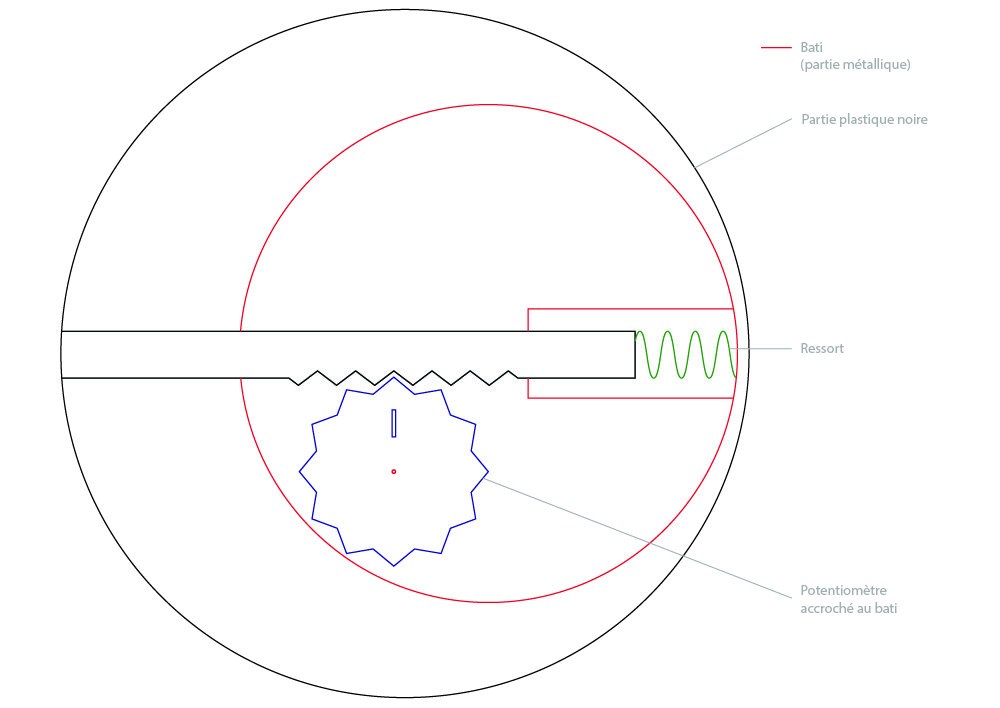
Ik denk dat je idee van een potentiometer goed is, maar op voorwaarde dat je een enigszins geavanceerde elektronische servo hebt. Ik denk niet dat het gemakkelijk haalbaar is, tenzij je van kinds af aan superscherp bent geweest in elektronica.
Aan de andere kant, omdat je zeker slim bent, kun je de moeilijkheidsgraad omzeilen. ;-) :-)
Je kent natuurlijk tweewielige hoverboards en als je goed kijkt, is wat ervoor zorgt dat het vooruit beweegt of remt, een relatieve helling ten opzichte van de grond.
Dus als je een plastic vat of een houten of kartonnen doos op het hoverboard legt, heb je 80% van je oplossing. Dan is het aan jou om te kijken hoe je de elektronica aan het handvat kunt repatriëren. Voor de voeding van de motoren is het alleen een kwestie van bedrading.
Voor uw opmerking over het verschil tussen kleine mensen en de basketbalkampioen vanuit het oogpunt van grootte. Ik denk dat als je naar de verrijdbare kabels kijkt, je een handvat in hoogte verstelbaar hebt (anders maak je er een zoals voor de krukverstelling).
Ik denk dat als je je handvat iets anders ontwerpt, je bovendien de pb op zijn minst op een theoretisch niveau moet instellen. Als je zelf kijkt, zie je dat je pols een variabele hoek heeft ten opzichte van een vlak evenwijdig aan de grond. Door deze hoek te versterken met een anders ontworpen handvat los je het probleem op (ik zal je niet meer vertellen, hoewel je al honderden keren hebt gezien waar ik aan denk zonder op te letten)
Bovendien, als u het handgreepsysteem met variabele hoek verstelbaar maakt: houd er rekening mee dat u tegelijkertijd het probleem van de lengte van mensen oplost.
Meer dan dat zal ik je niet vertellen, het is aan jou om te gokken ;-)
Vriendelijke groeten