Gebaseerd op een model uit een bekend mechanicaboek, kwam ik het gebruik van de energetische benadering tegen, hier zijn twee tafels, een dubbele schaar en de andere eenvoudig, het werk dat door deze persoon wordt voorgesteld is erg compact maar goed behandeld. Door grafische statica is het lang en vervelend, hier bepalen we snel de uitgeoefende inspanning. Het blijft om de reacties in de draaipunten te beheren, door middel van de simulatie kan Solidworks schattingen geven, laten we zeggen op een eenvoudige manier, zoals het bepalen van de knik door Euler. Bij voorbaat dank, een fijne dag verder.
Als het gaat om het bepalen van de acties in de verschillende schakels van het mechanisme, is grafische statica waarschijnlijk de meest geschikte oplossing, als je in de SolidWorks-omgeving wilt blijven. Energiemethoden maken het mogelijk om snel de input/output-relatie(s) in een mechanisme te vinden vanuit het oogpunt van inspanning. Ze kunnen ook worden toegepast om een bepaalde bindingsinspanning te bepalen, op voorwaarde dat de "goede" subsets in aanmerking worden genomen. En daarom is het niet eenvoudiger dan het gebruik van statica.
Als het na het bepalen van de krachten gaat om het bestuderen van de knik- of buigweerstand van de verschillende elementen, is het noodzakelijk om hun geometrie te kennen om de eindige-elementensimulatietools van SolidWorks te gebruiken. En in dit geval zijn uw diagrammen niet genoeg...
Je bent in het geval van een multi met een dubbele schaar en vanuit mijn oogpunt zit er een bot in je filmpje zoals het in je SW-schetsen verschijnt. (zie de set)
Als je in het geval van een enkele met dubbele schaar bent, is het oké.
Zonder iets toe te voegen aan de opmerkingen van @m_blt zijn vanuit mijn meest kritische oogpunt de assen en hun steunen voor dit type tafel. Ze moeten het onderwerp zijn van een specifieke berekening op alle punten van de kinematica.
Naar aanleiding van uw advies zal ik mijn integrale modellering afronden met de assen van de scharnierverbindingen en de rollen voor de twee geleiders en de structuur. Ik begrijp dat mijn schets onvoldoende is, mijn idee aan de basis is om een ontwerpstudie te doen om hier een exit-instructie te hebben de hoogte van de tafel volgens de slag van de volgende cilinder zonder implantatie, wat al een goede instap is, in een tweede keer is het de richting van mijn aanpak verankering van de cilinder die het minst bestraffend zal zijn tijdens zijn bedrijfscyclus. Bij mijn eerste schets is de belasting van de cilinder variabel volgens de overgangen van de kinematica en dat is normaal. Kunnen we toezicht houden op de ontwerpsimulatie door middel van een pilotschets (met de juiste klemmen, een optimaal ontwerp en een maximale cilinderbelasting om de juiste cilinder te kiezen), dit is de primaire betekenis van mijn vraag, die niet goed geformuleerd was, dat geef ik toe. Bedankt voor je opmerkingen, ik zal een ontwerp van mijn schaar afmaken en mijn voorschotten op het forum storten.
Ik blijf bij een eenvoudige, mijn doel is om eerst de cilinder te bepalen die is aangepast aan de te tillen last, ik wil de verhouding weten tussen de last en de kracht van de cilinder. Door in het stadium van een kinematische schets een ontwerpsimulatie te doorlopen, is het mogelijk door de schetsen te selecteren of ik moet overwegen om de gehele modellering af te werken met plaatwerk en dooselementen om het geheel te verstevigen. Dank u voor uw bericht en advies.
In het model van één ton denk ik dat het gebruik van SW-simulatie niet de beste methode is, aangezien de kracht op de cilinder niet lineair is met een hoge kracht in het begin en minder in de hoge positie. Dus als je in PEF wilt doen, heb je geen directe lezing en daarnaast zul je net zoveel simulatie moeten doen als je positie hebt als je in statische simulatie bent.
U kunt uw doelen echter bereiken door de Méca3D-software van @m_blt te gebruiken of door de bijgevoegde spreadsheet als voorbeeld te gebruiken en deze aan te passen als de dimensionale limieten onvoldoende zijn. Je moet ook letten op het zwaartepunt van de belasting in je ontwerp, want dat zit niet (of nooit perfect in het midden), vooral omdat het meestal een glijdende belasting is.
Een ander aandachtspunt is dat zelfs als je in je voorbeeld een enkele beitel verticaal hebt, je in je schets een multitafel hebt (er staan twee monoscharen naast elkaar).
Dus voor de keuze van de cilinder is het niet voldoende om te zeggen dat deze hydraulisch is om het project tot een succes te maken. Als we ons alleen beperken tot inspanning en weerstand, dan is het werken aan een enkele beitel voldoende. Als je eenmaal alle krachten van " assen en staven " kent, kun je een simulatie doen op het complete model met alle onderdelen die in volume prima zijn en in een ASM om in een paar posities de krachten te zien die dichter bij de werkelijkheid liggen.
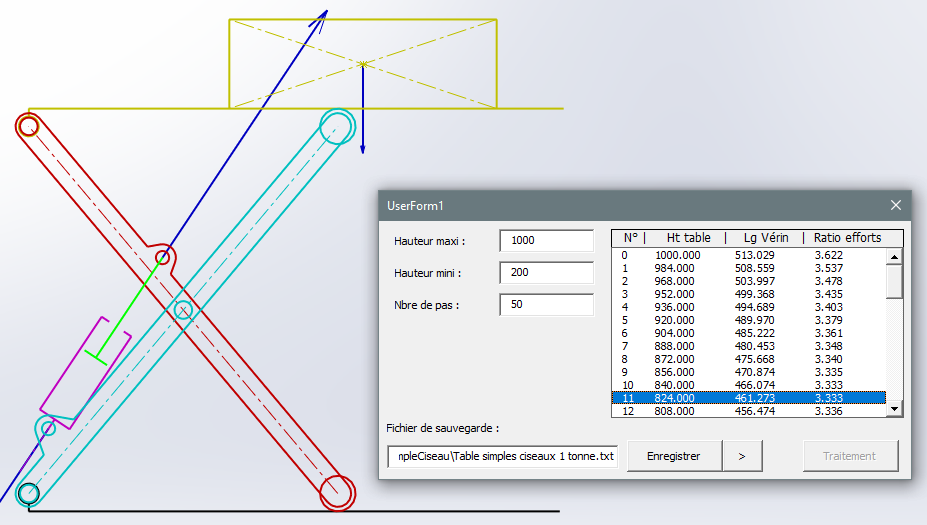
Het gebruik van een macro biedt een andere mogelijkheid om de kracht van de cilinder te evalueren op basis van de belasting en de positie van het tafelhefsysteem. De methode is noodzakelijkerwijs gebaseerd op de pilootschets " Esquisse1 " waarvan de geometrie en notaties worden gebruikt. De andere schetsen zijn er alleen voor de aankleding van het schema.
De macro neemt als invoer de maximale en minimale hoogtes van de tafel (draaipunt middenmidden) en het aantal intervallen tussen deze uiterste posities. Voor elke hoogte van de tafel wordt schets1 opnieuw geëvalueerd en geeft de bijbehorende lengte van de actuator weer. Het numerieke gebruik van virtuele taken maakt het mogelijk om de verhouding r te berekenen tussen de belasting P op de tafel en de stuwkracht Fv van de cilinder: r = Fv / P.
Aan het einde van de berekening wordt in de tabel de lijst met berekende waarden weergegeven. Het is mogelijk om deze waarden op te slaan in een tekstbestand (CSV-formaat herkend door Excel) en het schema te animeren. De berekening van de bindkrachten zou mogelijk zijn, ten koste van een analytische statische studie en een paar extra regels code...
Dank u, dit komt overeen met mijn eerste verzoek, dat ik handmatig had uitgebuit door mijn modellering te wijzigen en het model opnieuw op te bouwen om een opgelegd instelpunt te valideren, maar niet een automatisering door intervallen te beheren. Uw hulp is van onschatbare waarde, ik zal de tijd nemen om uw macro te bestuderen. Fijne Feestdagen. Vriendelijke groeten.
Ik merkte het probleem op met de belasting van de cilinder, die niet lineair is. Ik zal rekening houden met uw punt door het zwaartepunt toe te voegen. Bedankt voor al uw opmerkingen en voor het gegeven advies, ik zal de EXCEL-tabel archiveren en gebruiken. Vriendelijke groeten.
Hallo @tous Er is ook solidworks motion waarmee u in realtime de sterkte van de cilinders kunt evalueren Voor de simu denk ik dat een ontwerpstudie nuttig zou kunnen zijn (persoonlijk gebruik ik niet, een track om te verkennen)
Hallo Van mijn kant maak ik, naast Meca3D- of SW-beweging, soms schetsen van grafische statica. Voor een deskundigenrapport heb ik soms gemerkt dat " het zien van de krachten " geloofwaardigheid toevoegt aan de resultaten van een berekening die met de software is gemaakt (voor problemen met een " plan " of " quasi-plan "). Ik maak deze schetsen met blokken in een tekening als ik de 3D gemodelleerde onderdelen niet heb. Ik sluit de studie van de balans van een mand in
PDF van een diavoorstelling met video's de methode
Grafische statica zorgt wel voor een directe aflezing van de waarden voor een bepaalde positie, dit is heel duidelijk in uw document, door het virtuele werk te associëren (u kopieert uw schets met een begindimensie van de lijn van de bestudeerde cilinder, u verwijdert uw afmeting, u beweegt volgens de hoogte van 1 mm en u heeft de afmeting van de lijn van deze nieuwe huidige positie), Vervolgens verkrijg je door een schets te maken en de formule in te voeren, de kracht van je cilinder; Bedankt voor het voorbeeld van een hoogwerker met 3 actuatoren.