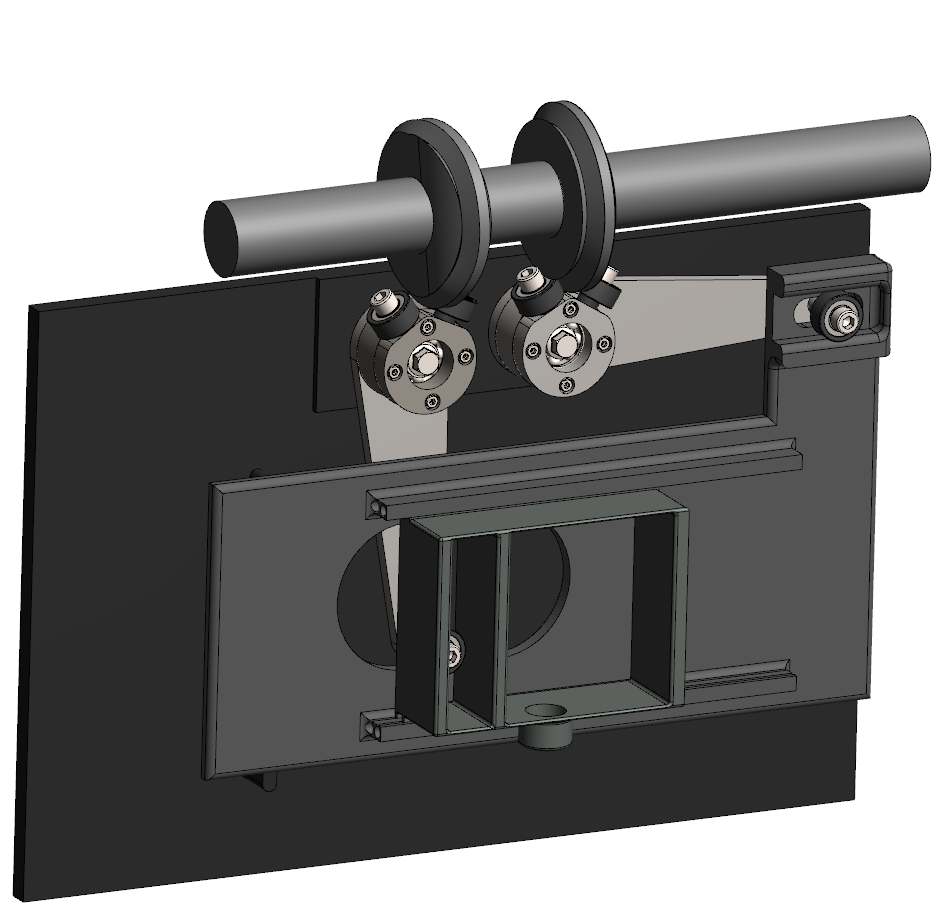
Hi everyone, I would like to thank you for answering me many questions and giving me ideas for my project to study the packaging of 900 chocolates per minute For those who are interested in knowing where I have it, the teacher decided in week 4 of the course that a rotary solution would be difficult, with all the forces that the chocolates will undergo, so he decided to let us choose solutions ourselves, I decided to go with a linear translation solution, I just rendered the first part of the report, and SOLIDWORKS file. Until now I have worked on the part that will lift the chocolates from the conveyor, I have used a cam system, (straight cam drives the first part of the system vertically, the second cam drives the second part of the system horizontally, this part is mounted by a rail system on the first part ... For the rest of the project, my idea is that the packaging will occur in (the second part of the system which moves horizontally), I will add a third cam that will inject the chocolates from in, to make them pack, once packed, this same third cam system ejects it at the top towards the conveyor. Attached I leave you the report and the 3D CAD file in pdf, you can see it with Adobe Reader if interested.
tell me what you think and if I need to make any changes
However, I have a bit of trouble seeing the cutscene and with chocolate balls how it stays stable. (can you post Your ASM in "pack and Go" mode with ZIP output
I was waiting to see your progress to post the document and a proposal for a solution. Indeed, as the forum forbids itself to do the work for the requester, especially when the students often lack experience, I waited to see your first design ideas
Kind regards
Click on certain images to see animations or cinematics
Ahmad_el_dik, Your zip contains parts and assemblies higher than the 2022 version, what is the version of Solidworks you use? Thank you for your feedback. @+. AR.
From what I learned from the 6 months I did in a company that almost only made special cam machines, the cams were machined in a disc with the cam runner axle parallel to the disc shaft. This has two advantages compared to your current design:
need a single roller instead of 2 (therefore cheaper)
As the cam runner is made in 1 machining operation with a milling cutter, we are sure that the cam will be able to move freely in the groove (your design with 2 cams and 2 faces machined on the cam presents much more machining uncertainties). As we only do one cam raceway machining, we are also cheaper.
NB: if you want to go for this kind of solution, it destroys almost all your study though. I'm not sure it's worth it for a university project.
For those who can open the assembly, yes I have errors in the motion analysis, after I added the parts that do the horizontal and vertical translation, I put constraints so that they touch the rollers, and I could no longer do motion analysis because of the errors
Hello, it was the teacher who showed us this cam system :(, I understand your point of view, but I only have 5 weeks left to finish the project (make the packaging system in the room that moves horizontally). honestly this teacher annoys me because every week he changes his mind about our project, he started the semester with an idea of a rotating system, after 5 weeks he said that it would be better to make a cam cam system like shown in the video ...
If you look on youtube all these types of machines, they all use cams, especially in high-speed rotary systems. Indeed, only cam systems providing the round trip (in a few hundredths of a second) can reach very high speeds. This limits the effects of vibration and does not allow the use of return springs that do not support high speeds, cause vibrations and will have broken a hundred times before a cam is worn out. ETC...
The cams are only used to load and unload the shock and especially to allow the vraping of the chocos which is the most complicated part of the machine.
You have to consider that the system visible in the video is only a very small subset. In the little document that I have given you, you will see the concepts that should guide the reflection. After the rest, there are technical choices that can be discussed.
While the purpose of the project is clear, to increase the production rate of chocolates by 50%, the structure of the whole to be designed is less so. A schematic diagram or architecture of the future mechanism would be welcome...
Back to the mechanism to be designed: there is no contradiction between a rotary system and a cam system... The video of the first messages shows the " chocolate packaging" sub-assembly which produces up to 600 units per minute. It is an intermittent rotating carousel, with six grippers that pass in front of stations performing basic tasks: one for loading chocolate, two (three?) for packaging operations, and one for evacuation.
For each station, intermittent movements are generated by cams for " perfect " synchronization. At a rate of 600 hp/min, this means that a chocolate is ejected every 0.1 s, but that it remains in place on the carousel for about 0.5 s, and in front of the stations in the " packaging " area for about 0.4 s.
In the planned system, the aim is to carry out all the functions during the translation phase of the two slides. At 900 hp/min, you have 0.067 seconds to pick up the chocolate, wrap it, eject it and return to the starting position: 6 to 10 times faster than the 600 hp/min system... The advantage of the rotary system is to " make the useful phase last", in this case the packaging operation.
If we add that the slides have significant masses, and that the packaging system still has to be embedded on the terminal slide (" packaging system in the part that moves horizontally "), we obtain considerable masses in intermittent movements. Masses subjected to "crazy" accelerations, the forces will also be subject to " crazy " accelerations... We will have to think about lightening, working on shapes and materials.
@ahmad_el_dik , don't complain too much about your teacher. After all, he teaches you what your daily life will be with your future clients: a series of back and forth as well as walking forward to better go back.
This is probably the most interesting lesson of your project: learn to detect where the " blocking " points may be as well as make models that can be easily modified/configured.