Hello
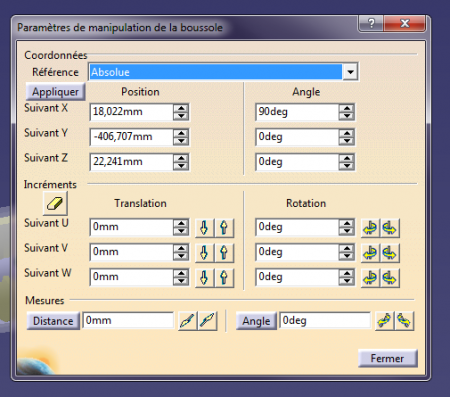
I would like to learn how to use the compass manipulation parameters (see image in copy). Strangely enough, I've been doing CATIA for 20 years and I've never really needed to use it. I always managed with benchmarks and constraints.
On the other hand, I believe that it can be useful to precisely position one part in relation to another in a product without the need to use constraints.
Could you remind me of the different functions of these compass manipulation settings? And in particular, how do you use it in practice?
Thank you in advance for your help.
Hello
See CATIA Help (Infrastructure / CATIA Infrastructure User's Guide / Basic Tasks / Moving Objects Using the 3D Compass.
If not installed I can make the copies
I mainly use dynamics to preposition (orient) objects that are not subject to constraints.
In other words, I place the compass on the element I want to move, I select it in the graph to activate (compass in green) and then dynamically I orient it from time to time, right-click on the compass to open the compass settings window.
No more uses.
OK. I think I understand even if I didn't understand your explanation: "In other words, I place the compass on the element I want to move, I select it in the graph to activate (compass in green) then dynamically I orient it from time to time, right-click on the compass to open the compass settings window."
Method:
1) place the compass on the element I want to move: OK
2) select in the graph to activate (compass in green): NOT OK, I never see the compass in the graph or construction tree. Can you tell me more about this step?
Ready in advance
A+
It is the object(s) to be moved that we select in the graph.
boussole.mp4