I'm looking for a simplified method to automatically reconstruct the decomposition of my forces on a bolt connector. (use of a parallelogram) I made a basic calculation note to have the different constraints taking into account inertias. Using a parameterized sketch I want to have the possibility to have a design study carried out and to have the search for the less penalizing location of my screws on my assembly, hypothesis A comes from an online resource, hypothesis B my research is based on a mechanical clamp. Thank you for an orientation on the interaction between the parameterization of my digital twin and the simulation tool of a design study. Spectrum.
Hello I looked at your Excel and don't really understand your need. in particular I do not find your hypotheses A and B in the Excel
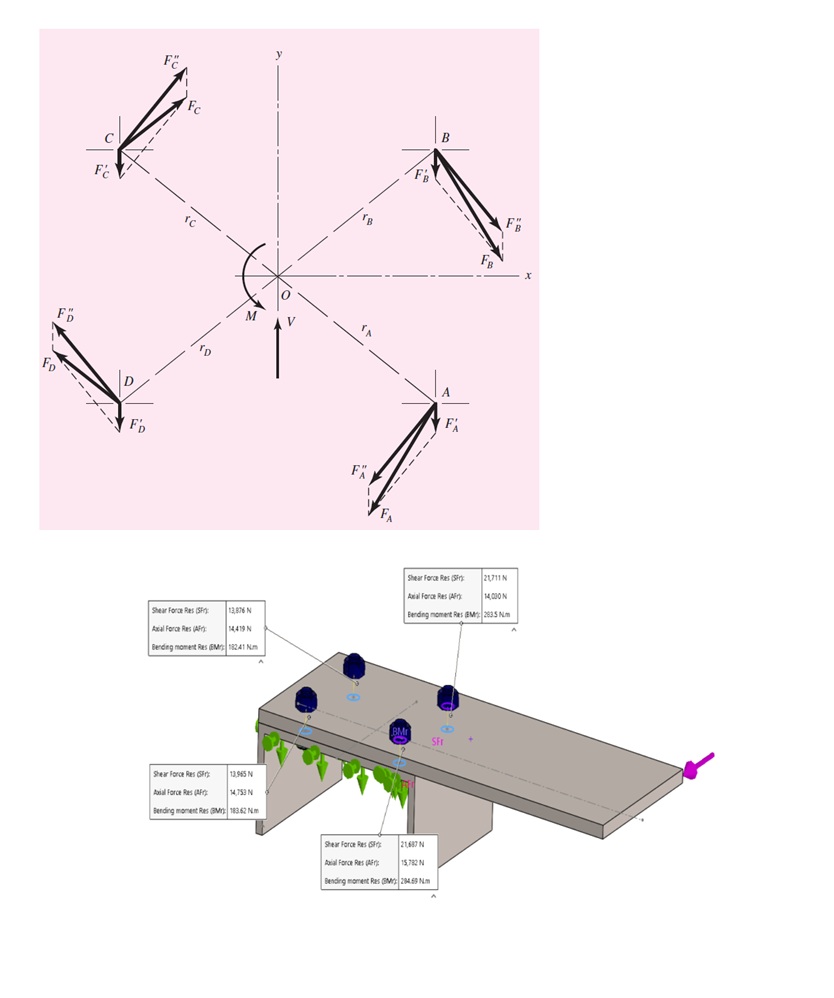
In your Excel, one assumption is wrong, it is to consider that everything revolves around O (the diagram with the arrows is also wrong by the way). Since the force is not centered (doubly so), the A and B screws actually take more effort (and the A more than the B, which seems logical to me since the force is applied closer to A).
In this kind of finite element calculations, the friction coefficients are quite important (unless the pre-tightening is high enough to avoid any slippage): those of the bolt connectors, but also those between the 2 parts (sheet metal and U) with the management of the contact on: non-penetration + non-zero friction coeff.
In the end, the problem is hyperstatic, so it is quite difficult to model (if not almost impossible) in Excel. The location of the holes in relation to the wings will also change the way the contact is made (not necessarily predominant but in any case a little bit)
My basic idea is to find the right position of the screws to take up the forces (this is my hypothesis B), so if I understand your remark, we don't have symmetry, we agree on this point the screws closest to the torque assume the first recovery of the forces, so why in this case have an identical matrix in X and Y.
I want to discuss whether it is possible to justify the most suitable position for the second set of bolts. I agree hyperstatiques-Simples.pdf Beams (914.1 KB) with you to change the layout of the bolts, without slippage by putting a preload in the bolt connector have by a design study by adding sensors that will position with an increment the Xi, Yi of the C bolt and the Xi,Yi of the D bolt, I do not touch the A and B bolts. I'm going to make my mock-up and add the sensors, I was accompanied on this tool by a person from the m.blt forum on a lifting table solution by parallelogram or scissors.
P.s: if the whole profile does not revolve around O, a counter-torque will oppose these are our bolt connectors, but how to discriminate the interactions, I will start by removing some connectors and relaunch a simulation, how would you proceed to highlight the phenomenon? It's a no-stakes approach, I'm getting familiar with solidworks connectors.
P.P.s: If we are in the presence of a hyperstatic problem, can we break it down as in the case of the study of beams by treating in two stages, the load and the supports, the clamping force exerts a distributed pressure that can be assimilated or not? to a distributed load?
Thank you for your answer and your help on my questioning.
As an attachment the case of a hyperstatic beam, I can base myself on one of the methods of resolution.
I agree with @froussel in his questioning of the model you wish to use to analyze this assemblage.
In principle, in a bolted joint, the threaded members should not be subjected to shear. It is the normal force they exert that must ensure that the faces in contact do not slip by adhesion. If the grip is insufficient and there is a risk of slipping, other elements should be used to prevent slipping, such as positioning feet. Even though there are fitted bolts that can play this role...
The adhesion at the level of the contact, a very variable physical phenomenon within the same surface, as well as the tolerance on the dimensions and positions of the holes, do not allow you to predict, in your model, which of the four elements will come into contact in the event of slipping. Even if adjusted bolts or positioning feet are used, it would be reasonable to provide only 2 of them, which will be sufficient for positioning, and will withstand any shear. The other threaded elements will only have a clamping function. It is around these basic principles that I would look for a study model with SolidWorks Simulation, to determine how many threaded elements are needed, and of what dimensions. As for a theoretical model, it may be difficult to establish, and even more difficult to solve...